Delta RMC151 User Manual
Page 80
RMC70/150 and RMCTools User Manual
none
This is the default setting.
Fault
Input
RMC70: The Fault Input of the axis.
RMC150: The Fault Input of the axis. Only available
on the Quadrature Module.
Dedicated Available on RMC70 QA and RMC150 Quadrature
modules only. For the Positive Limit Input, this is the
PosLim input. For the Negative Limit Input, this is
the NegLim input.
general
input
RMC70: any input from a D8 module, but only from
the first 12 I/O points as listed in the I/O Monitor.
RMC150: any general discrete input from any
module.
Operation
The Positive Limit Input and Negative Limit Input status bits indicate the state of the Limit
Inputs. When one of these inputs becomes active (as indicated by the status bits), the
corresponding Positive Limit Input or Negative Limit Input error bit will be latched. The
error bit will cause a Halt to occur if the Auto Stops are configured to do so and the Direct
Output Status bit is off.
Issuing Commands while a Limit Input is Active
While a Limit Input is active, closed loop motion commands that move the axis away from
the valid range will set the corresponding Limit Input error bit, causing a halt if the Auto
Stops are configured to do so. Motion commands that move toward the valid range will
not set the a Limit Input error bit. This allows you to move an axis back within the limits
without causing further errors.
Therefore, if the Negative Limit Input is active, a motion command that moves the axis in
the negative direction will cause an error. A motion command that moves the axis in the
positive direction will not cause an error. Likewise, if the Positive Limit Input is active, a
motion command that moves the axis in the positive direction will cause an error. A
motion command that moves the axis in the negative direction will not cause an error.
Moving Toward the Valid Travel Range
If a Limit Input is active, and the axis is in open loop, and is drifting slightly, issuing a
closed loop motion command may again trigger an overtravel error. This is because the
target position starts at the actual position, velocity and acceleration at the time the
command is issued. Therefore, the target may continue moving away from the valid
range while accelerating to turn around. This will trigger an overtravel error. To avoid
this, first issue a Hold Current Position (5) command, then the motion command. Or,
simply use an open loop move to move into the valid range.
Limit Input Polarity
The Limit Input Polarity parameter determines whether Positive Limit Input and Negative
Limit Input are active high or active low. The Positive Limit Input status bit and Negative
Limit Input status bit indicate whether or not the corresponding limit input is active. For
details on voltage levels, see the specifications for the module the input is located on.
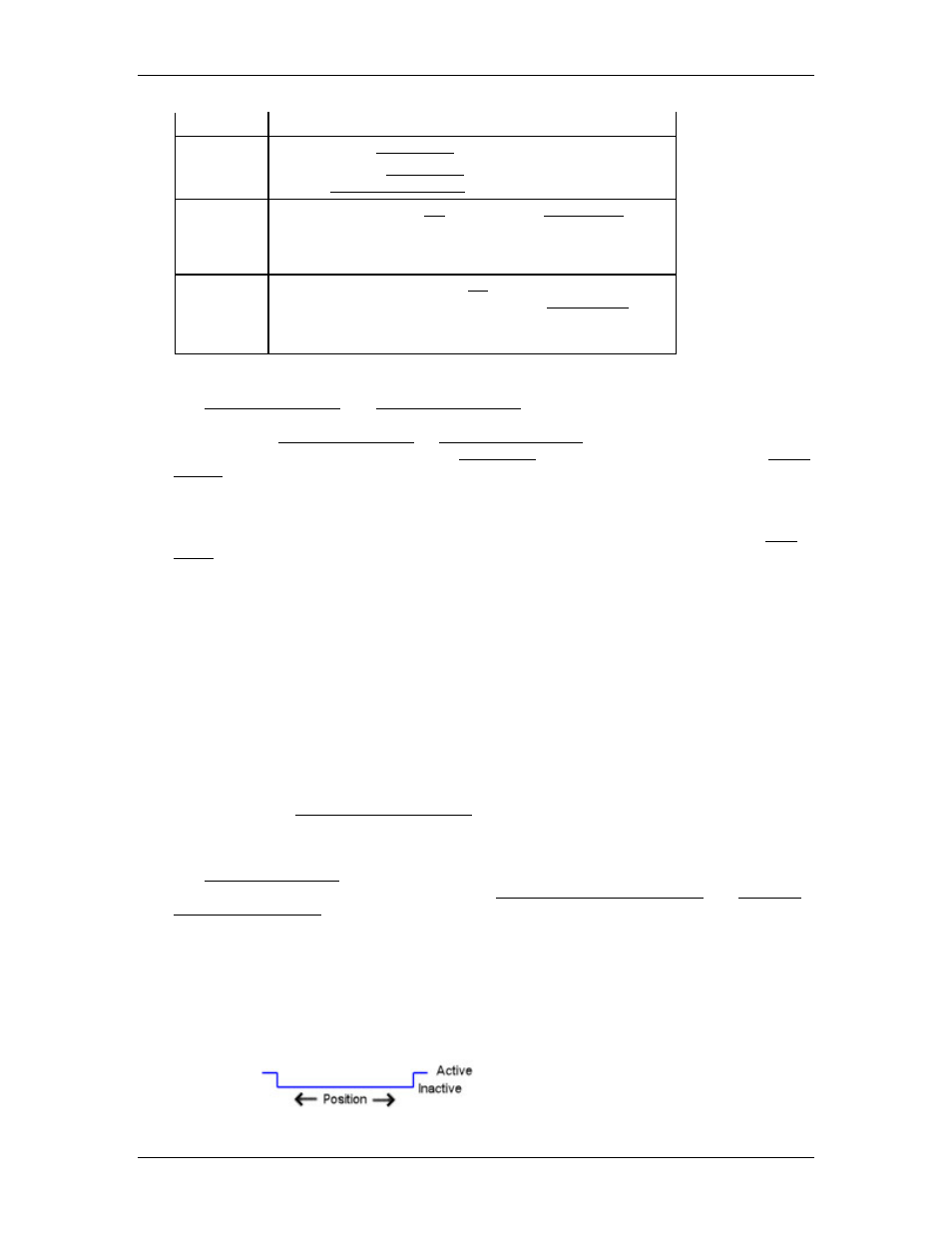
Physical Placement of Sensors for Limit Inputs
Typically, the sensors for Limit Inputs should be installed at both ends of travel on the
axis. For safe operation, they should be designed such that they become active close to
the end of travel, and remain active to the physical end of travel. This increases safety,
because motion commands (other than Direct Output) will only be allowed in the direction
toward the valid range of travel. A diagram is shown below:
60
Delta Computer Systems, Inc.