Actual force a, actual force b, D.3.7 actual force a, actual force b – Delta RMC101 User Manual
Page 890
RMC100 and RMCWin User Manual
D-28
using a 12-bit (4000-step) digital-to-analog converter (DAC), which will generate a ±10,000 mV
output in steps of 5 mV. The internal drive calculations are done to 14-bit resolution. This
additional resolution is used to dither the least significant bit of the output, giving additional
resolution.
In many applications, the full ±10 V range is not used, and drive output beyond that range may
even be unsafe. For this reason, the Limit Drive (L) command can be issued to limit the drive
output range to be smaller than ±10 V.
Note:
This field is unused on 12-bit analog channels or 16-bit analog channels that do not
include channels 0 and 2. That is, on 16-bit analog modules, only channels 0 and 2 have drive
associated with them. On auxiliary pressure/force channels, the drive is only affected by the
Open Loop command; when controlling pressure/force, the position axis's drive is used.
Note:
Software adjusts the null. There are no hardware nulling adjustments on the motion
control module. Null drive will be near 0 volts.
Why Bother?
If the DRIVE tries to go below -10,000 or above 10,000, an overdrive condition has occurred.
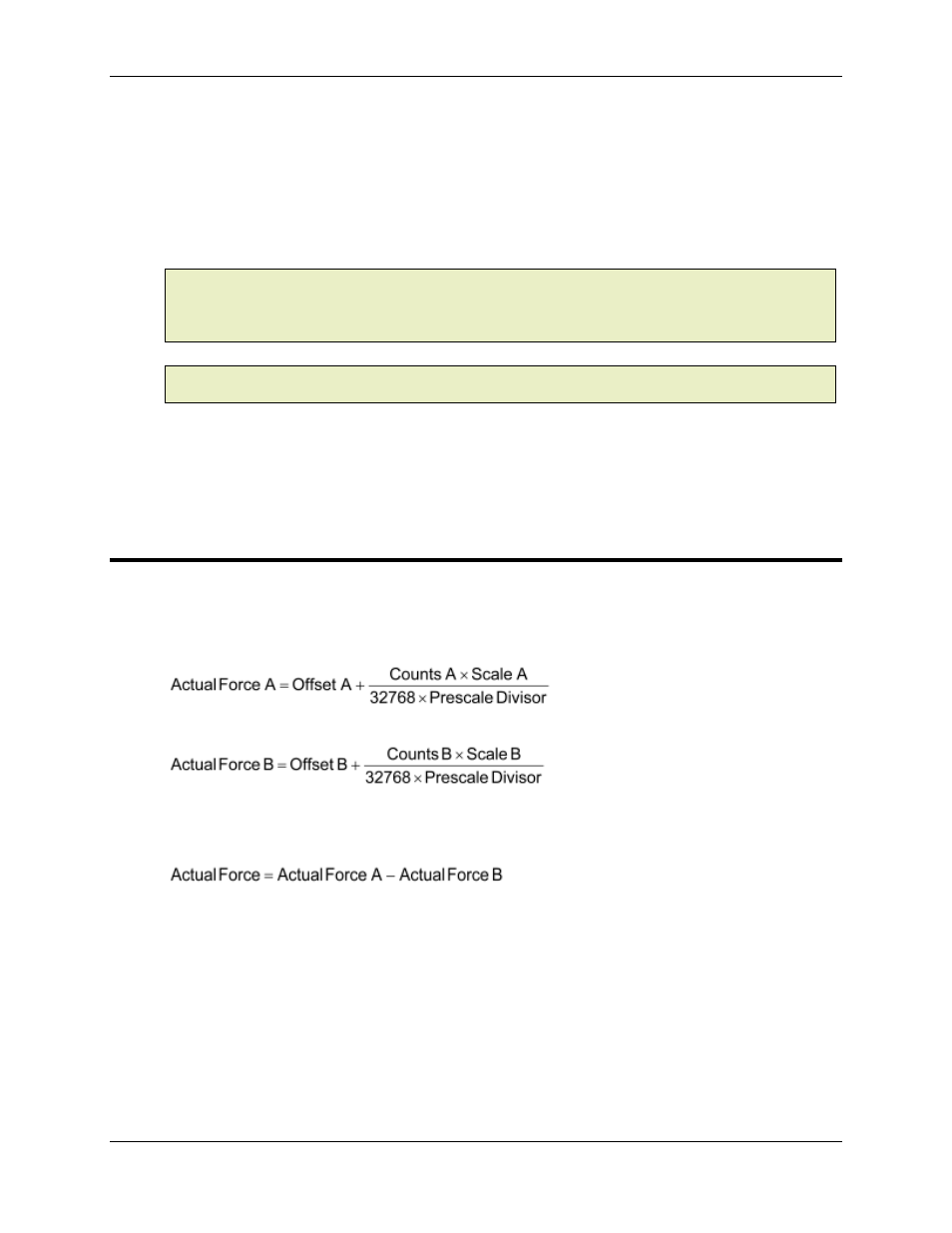
D.3.7 Actual Force A, Actual Force B
Only differential force axes use these two status fields. They give the analog transducer reading
after conversion from Counts to force units.
These fields are calculated as follows:
The Actual Pressure/Force status field is then calculated from the difference between the two as
follows: