Speed control, Speed control -15, 6 speed control – Delta RMC101 User Manual
Page 201
Speed Control 4.6
Controller Features
4-15
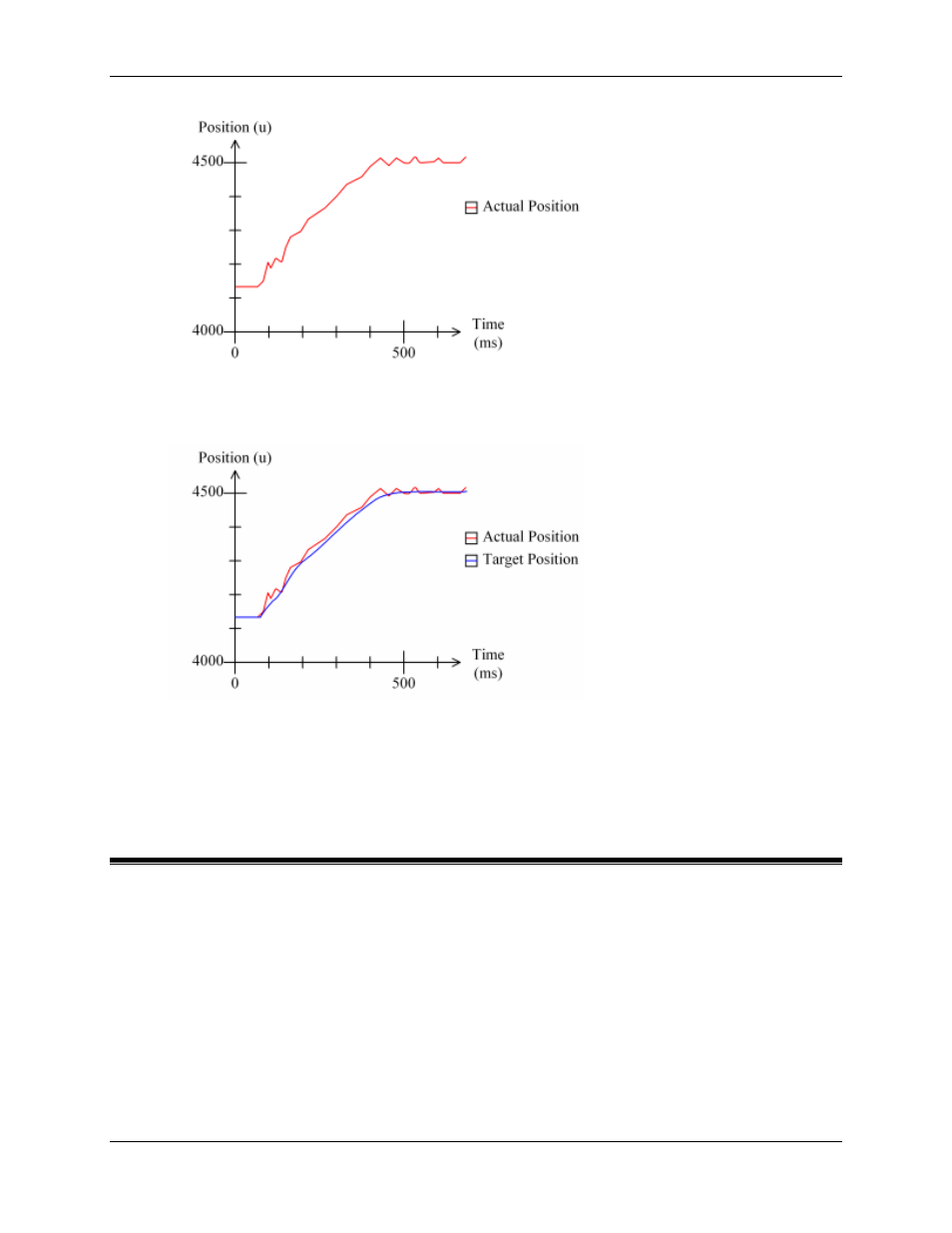
Gearing to a manually-guided voltage such as a joystick often results in rough motion due to
mechanical jitter and friction in the potentiometer itself. Therefore, the jaggedness of the previous
graph can be reduced by applying the Filter Time Constant.
This may be all that is necessary in this application. However, if it is possible for the user to move the
joystick too quickly, then the Velocity and Acceleration Limits can be used as in the first example to
prevent over-speed conditions. The Reference Deadband can be used to hold the Target Position
steady when the reference input is at rest.
4.6 Speed Control
The RMC100 provides two modes of closed loop speed control:
• Speed Control with Position Loop
This mode performs closed loop control on the axis position (not speed). To achieve speed
control, the RMC100 generates a target that moves at the commanded speed. This means that
if the Actual Position of the axis falls behind the Target Position, the RMC100 will attempt to
catch up to the moving Target Position, requiring the axis to move at a speed much higher than
the commanded speed. This may be undesirable in certain applications.
• Speed Control with Velocity Loop
This mode performs closed loop control on the axis speed. If the Actual Speed of the axis falls
behind the Target Speed, the RMC100 will attempt to catch up to the Target Speed.