Delta RMC101 User Manual
Page 235
Position/Pressure Control 4.12
Controller Features
4-49
• The next step is the integral gain. Gradually increase it as long as it does not adversely affect
the system. Generally, the Integral gain does not need to be extremely high. In this example,
150 was deemed enough. The plot (not shown) did not change much from the previous one.
This does not mean the integral gain won't help! It is important for dynamic changes that may be
encountered during system operation and may not be present during the tuning.
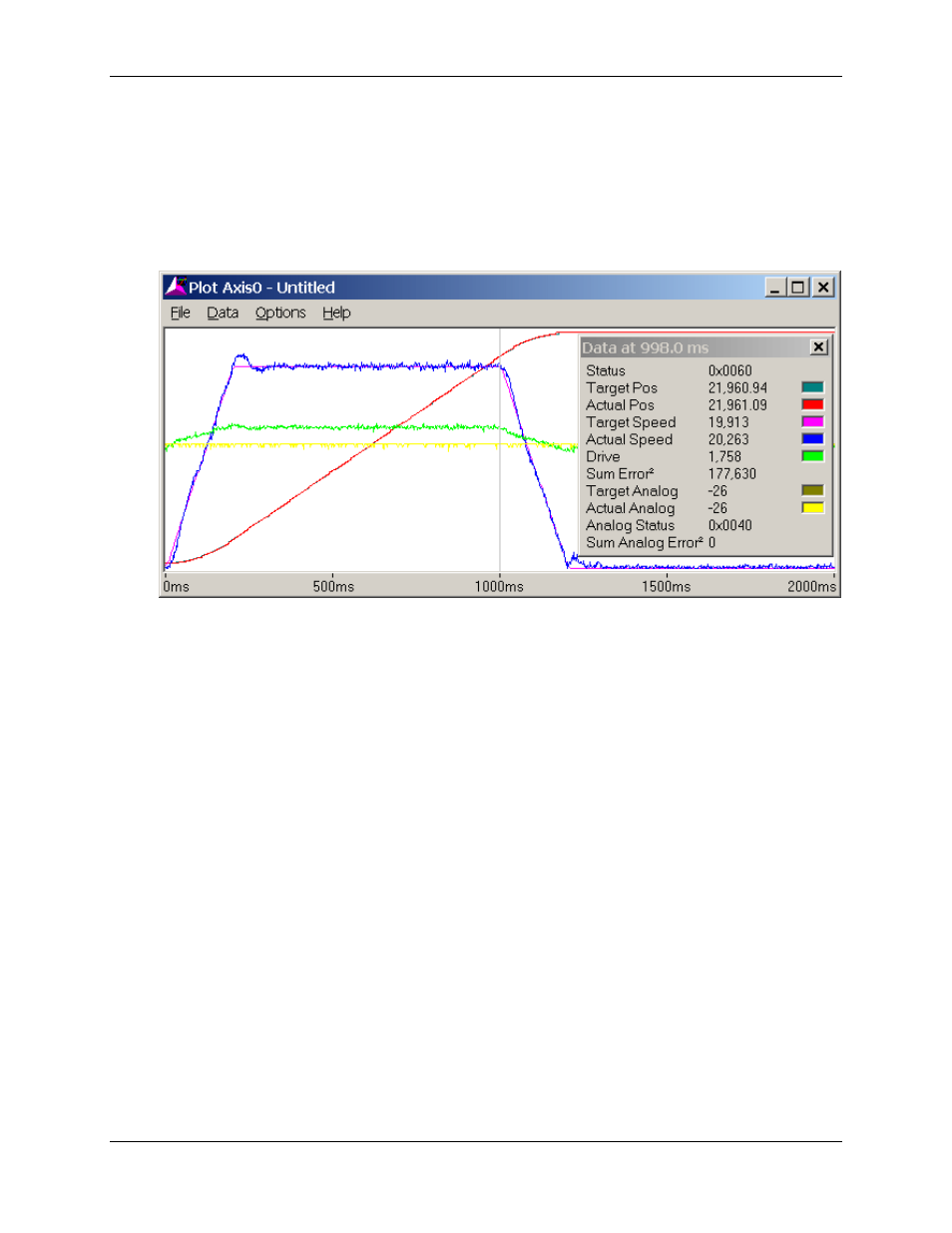
• Increase the Differential Gain. In this example, it was increased to 250. When the Differential
gain is high enough, the drive output may look fuzzy:
o
If the system starts oscillating or chattering, decrease the Differential Gain.
o
The Sum Error Squared decreased to 177,000.
• Increase the Acceleration Feed Forwards to get rid of the following errors during acceleration
and deceleration.
• After increasing the Acceleration Feed Forwards to 200, the plot looks like this: