Delta RMC101 User Manual
Page 856
RMC100 and RMCWin User Manual
C-86
Note:
This parameter is available in RMC100 CPU firmware dated 20020222 or later.
This parameter allows filtering the position on an analog position or velocity reference axis. By
default the filter is disabled. If this parameter is set to a non-zero value, then the position
feedback is filtered using an Infinite Impulse Response (IIR) filter with a time constant set to this
parameter's value in milliseconds. The equivalent cut-off frequency in Hertz is found by 1/2pt,
where t is the time constant in seconds. For example, a time constant of 5 milliseconds is
equivalent to a cut-off frequency of 32 Hz.
This feature should be left disabled in systems that need to react to quick changes in the
reference input, as increasing this filter value will increase the phase delay in the system
feedback.
To compute an initial value for your time constant value, recall that for a step jump in the
feedback value, an IIR filter will reach 63% in 1 time constant, and 99% in 5 time constants.
Note:
When this parameter is set to zero, the IIR filter is disabled, as is the slew limiting
controlled by the Velocity Limit, and Acceleration Limit parameters.
For reference axes, the Actual Position status field reflects the actual reading from the
transducer, and the Target Position reflects the filtered position, after applying the Filter Time
Constant, Deadband, Velocity Limit, and Acceleration Limit parameters.
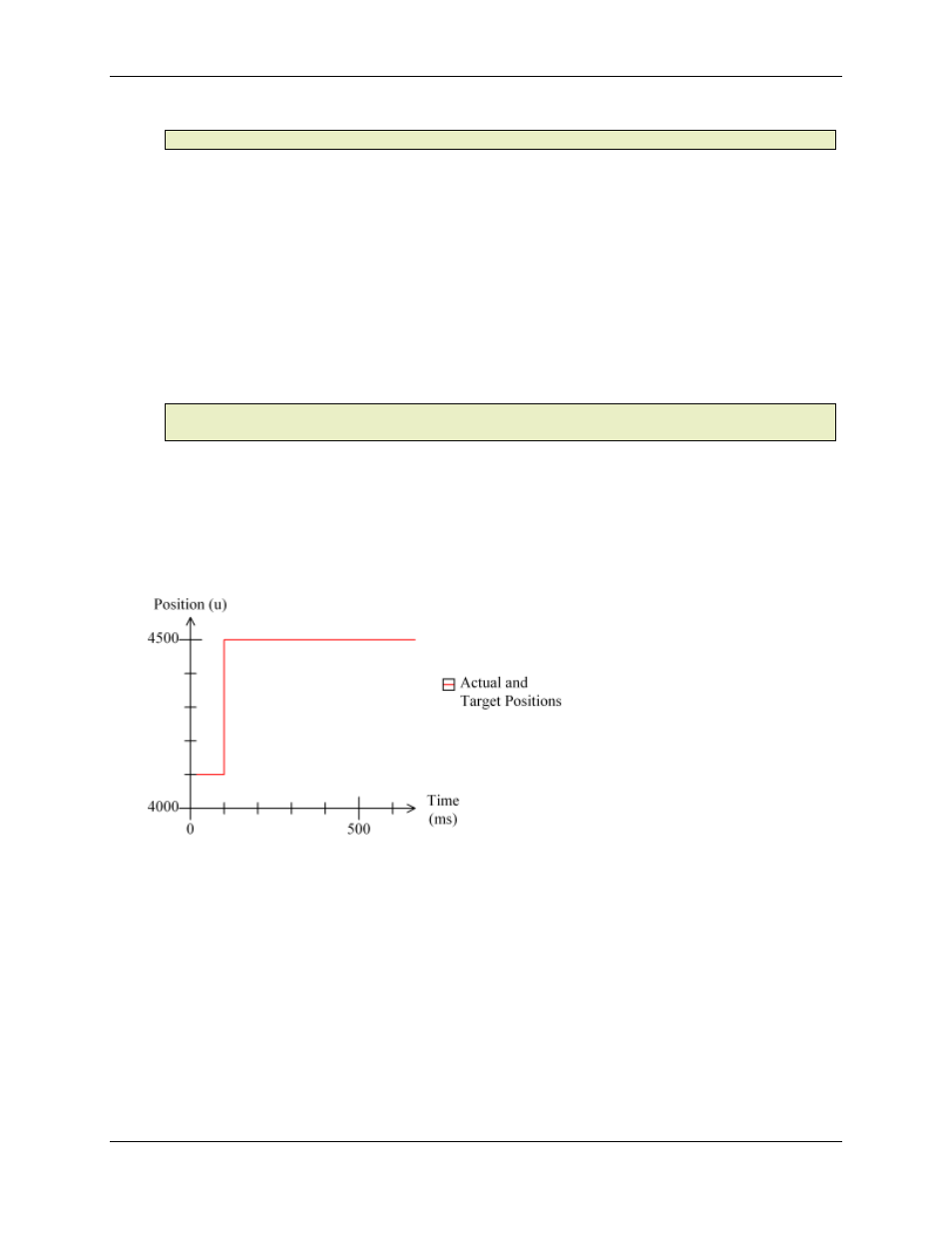
For example, suppose the Actual Position makes a jump from 4100 to 4500 position units. With
the position filter disabled (Filter Time Constant set the zero), the Target Position would also
match the Actual Position:
By applying a non-zero Filter Time Constant, the Target Position does not make a step jump: