Stepper scaling, Stepper scaling -53, 6 stepper scaling – Delta RMC101 User Manual
Page 597
Quadrature with Stepper Output 6.4
Transducer Interface Modules
6-53
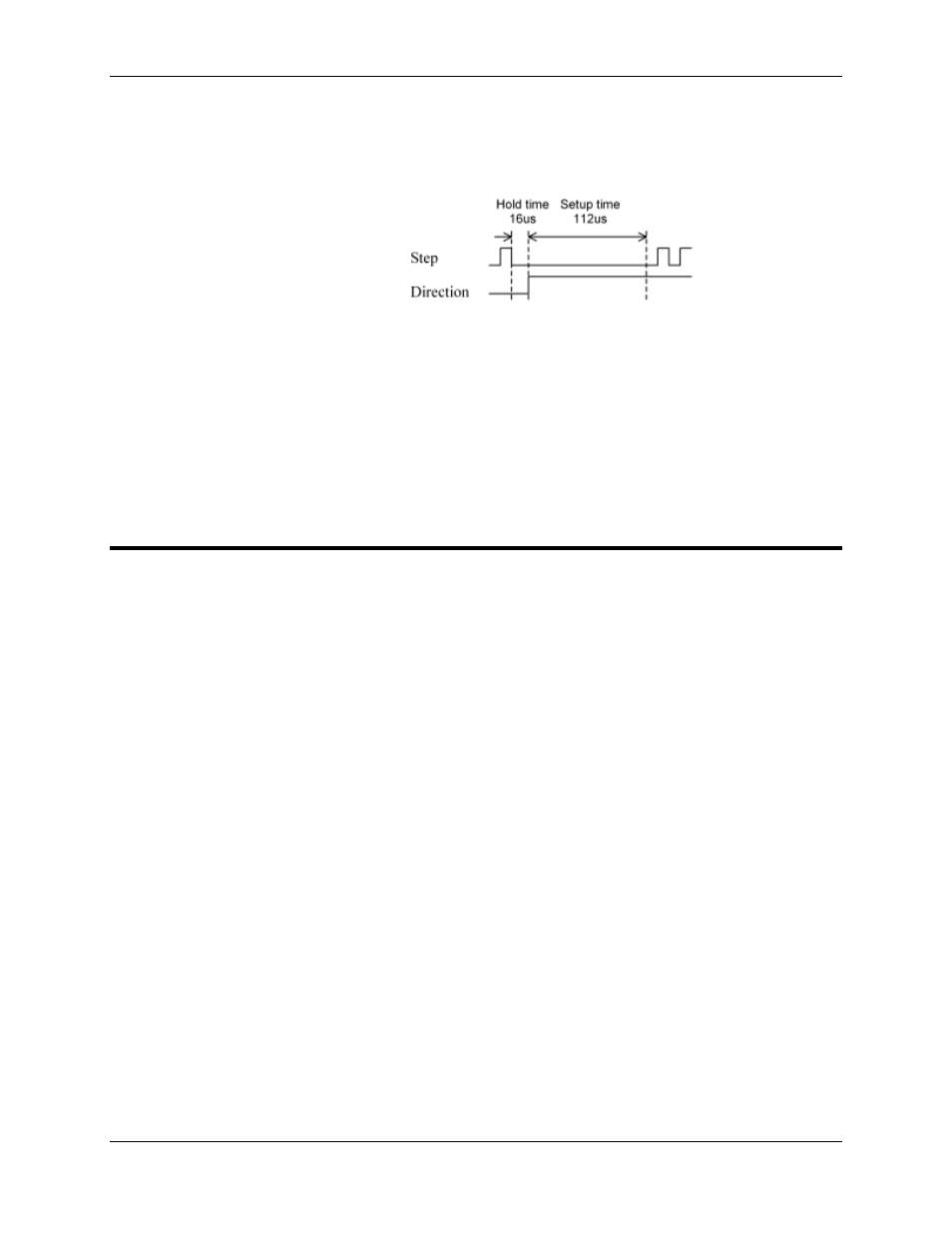
Direction Change Delays
Hold time = 16 us
Setup time = 112 us plus half step
period
See also:
Stepper Overview
Stepper Wiring
Stepper Configuration
Stepper LED Indicators
Stepper Scaling
Stepper Compensation
Homing
6.4.6 Stepper Scaling
Defining the Valid 16-bit Position Range
For general scaling information, see the Scaling Overview topic.
Because the RMC uses 16-bit positions, positions must all fit within a range of 65,536 position
units. Because position units are user definable, and speed control and indexing applications can
get around this limitation, most applications are not limited by this range. See the section below
on defining position units.
Stepper axes use the Coordinate Limit parameter to define the valid range of position units. The
valid Coordinate Limit values extend from 65535 to 0, and the valid position range then extends
from the Coordinate Limit value to the Coordinate Limit plus 65535. Delta recommends using one
of the following two values and ranges:
Coordinate
Limit
Range
0
0 to 65535
-32768
-32768 to
32767
The first uses unsigned position units and the second uses signed position units. Other position
ranges require extra work to use with PLCs.
Translating to and from Position Units
The method of setting up the scale for a stepper axis with quadrature feedback differs
significantly from the scaling of other axis types on the RMC. This was done to better fit the needs
of stepper applications.
The stepper module has two scales. One scale defines the relationship between incoming
quadrature counts and the resultant Actual Position. The second scale defines the relationship