Using command mode, Using command mode -13, 3 using command mode – Delta RMC101 User Manual
Page 263
Digital I/O 5.1
Communications
5-13
Output
RMC100-M3
RMC100-M4
0
In Position
(Axis 0)
In Position
(Axis 0)
1
In Position
(Axis 1)
In Position
(Axis 1)
2
In Position
(Axis 2)
In Position
(Axis 2)
3
In Position
(Axis 3)
In Position
(Axis 3)
4
In Position
(Axis 4)
In Position
(Axis 4)
5
In Position
(Axis 5)
In Position
(Axis 5)
6
User
Controlled
In Position
(Axis 6)
7
User
Controlled
In Position
(Axis 7)
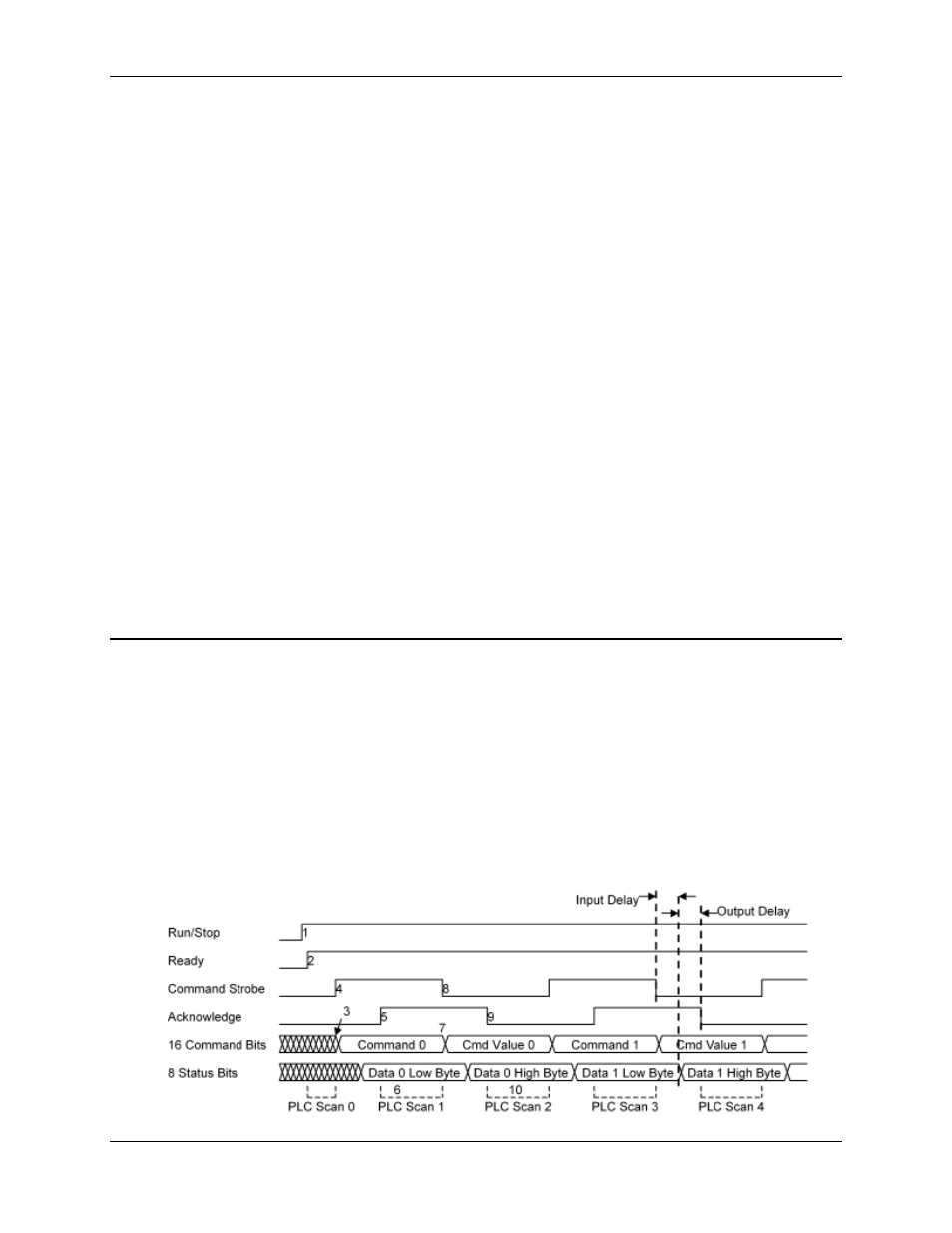
5.1.6.3 Using Command Mode
This mode allows any motion controller command to be sent to the motion controller using the
Communication Digital I/O. In addition, it allows the user to request a wide range of status
information back, including ACTUAL POSITION. This mode is more complicated than the other
modes and requires a PLC to communicate with the RMC, but it is much more capable than the
other Communication Digital I/O modes.
Refer to Features Shared by All Modes for details for input and output assignments that are
common to all modes.
Basic Operation
In this mode, commands and status information are sent between the motion controller and the
programmable controller using the following sequence of steps: