Delta RMC101 User Manual
Page 874
RMC100 and RMCWin User Manual
D-12
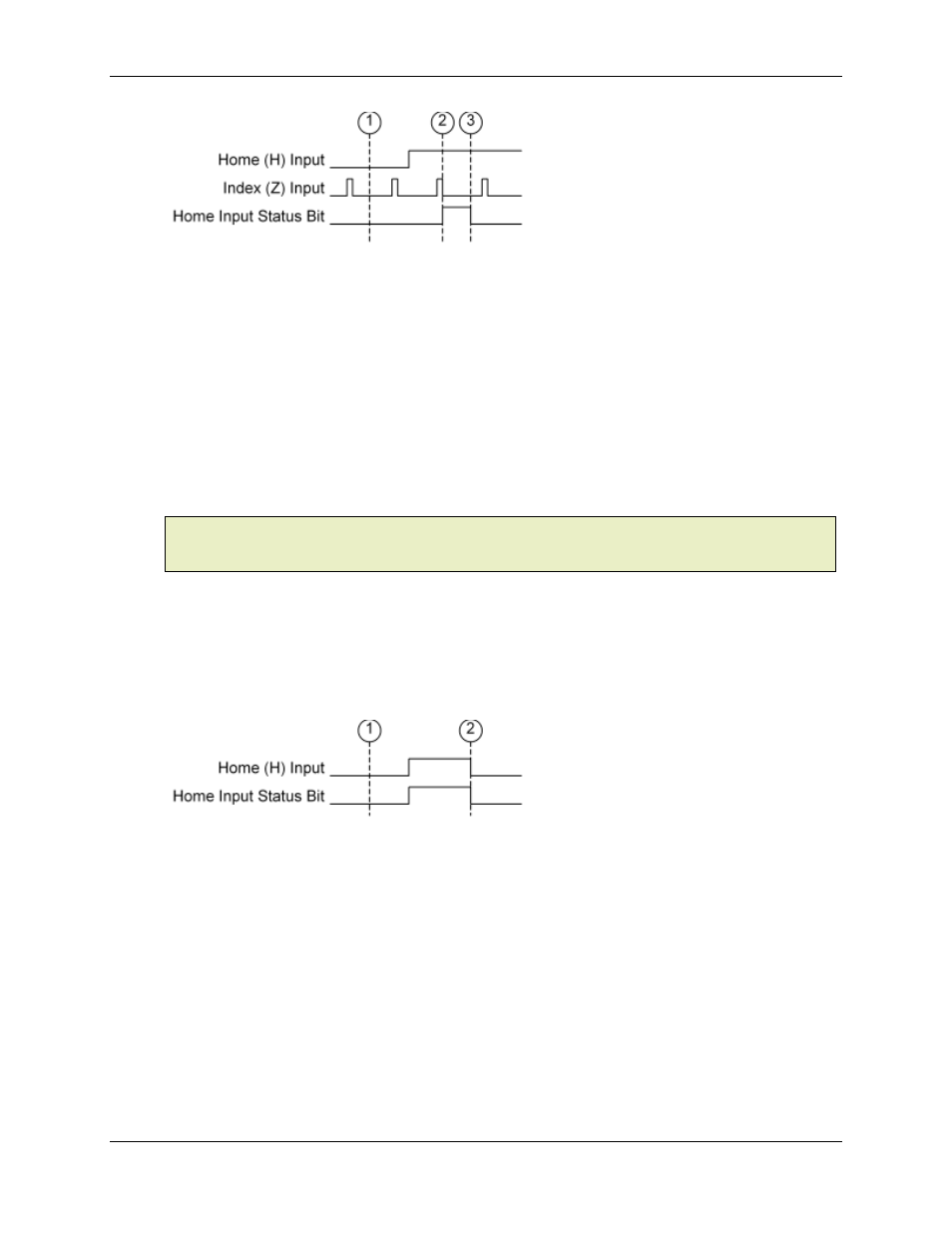
1. The Arm Home (@) command is issued. Without this command the Actual Position will not
latch to the home position, nor will the Home Input status bit ever be set in this mode.
2. The Actual Position is homed because both the Home and Index (Z) inputs had been active,
but one drops to inactive (the Z in this case). The Home Input status bit is set to indicate the
axis has homed.
3. A Go (G) command is issued, which clears the Home Input status bit.
• Level Mode: In this mode, the Home Input status bit is set when the Home input is currently
active, and is cleared when it is inactive. Notice that the level is not latched, and that neither the
Index (Z) input nor the Arm Home (@) command affect this status bit.
Note:
Revision 1 Quadrature modules require that the Arm Home (@) command be issued at
least once before the Home Input status bit works correctly. This anomaly has been corrected in
later revisions.
Notice that although the Home Input status bit ignores the Index (Z) input, the actual homing of
the axis still occurs when either the Home (H) or Index (Z) input goes inactive after both had been
active. However, this Home Input status bit mode is not intended to be used with the Index (Z)
input, and therefore it is recommended that the Index (Z) input be left disconnected and
configured as "active with no current" in the Configuration Word.
Example:
1. The Arm Home (@) command is issued. Without this command, the Actual Position will not
be homed on the falling edge of the Home input. However, this has no effect on the Home
Input status bit.
2. The Actual Position is homed because the Home input goes inactive. The Home Input
status bit is cleared to indicate that the Home input is now inactive. As noted above, this
example assumes that the Index (Z) input is always active.
See the Homing a Quadrature Axis topic for details on using this status bit to home an axis.
The RMC can be configured to automatically stop on the rising edge of this bit by using the Auto
Stop parameter, but this is rarely used in applications.
Bit 9 (MDT, SSI, Analog, Resolver or QUAD) - Integrator Windup
This bit is set when the drive due to the integrator exceeds ±20% or 80% of full drive, depending
on the setting of the Integrator Limit bit in the Configuration word.