Delta RMC101 User Manual
Page 572
RMC100 and RMCWin User Manual
6-28
However, because the Offset is also used to convert transducer counts to position units, it cannot
be set independently.
Translating to and from Position Units
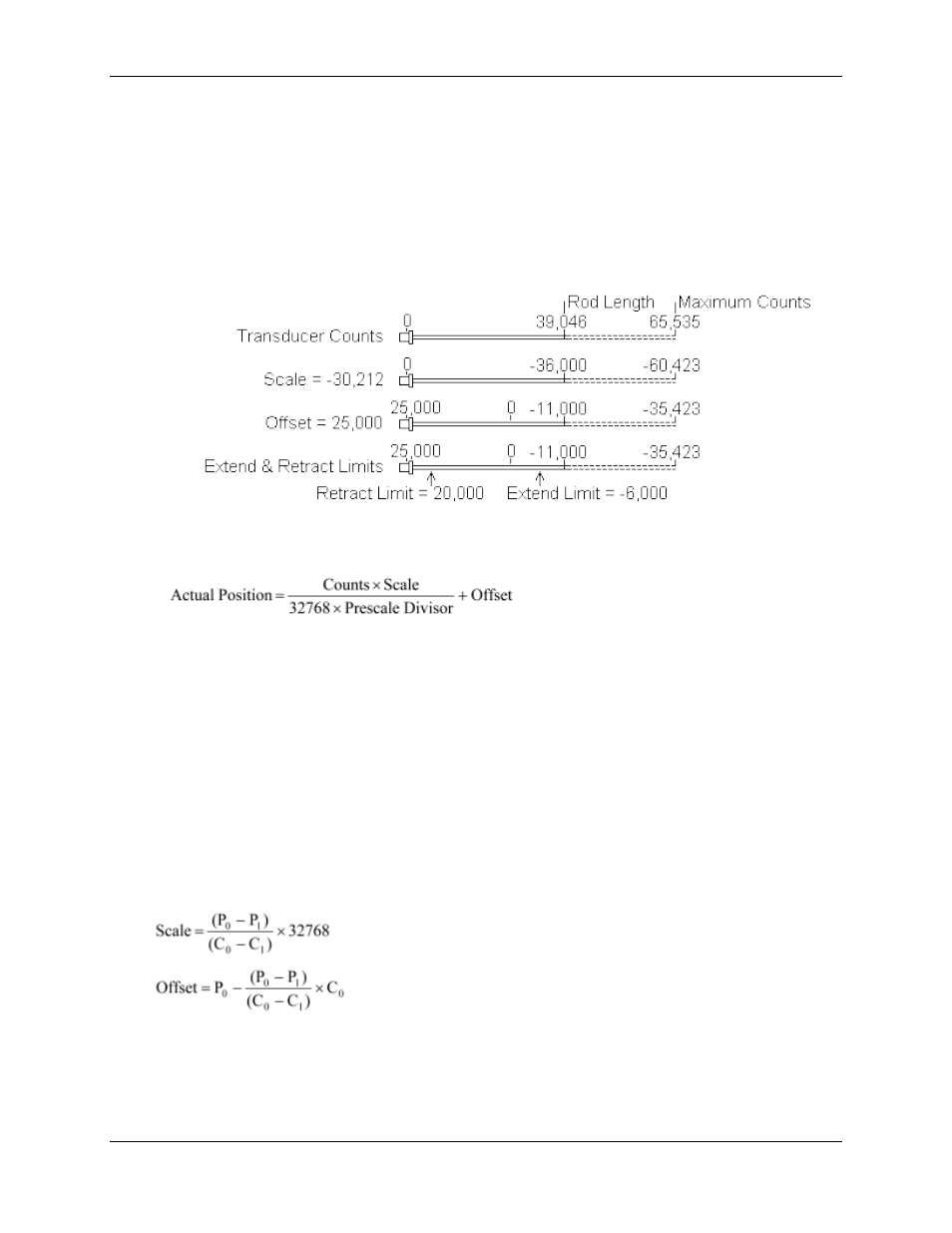
The Scale, Offset, and the Prescale Divisor bits of the Configuration word parameters are used to
define position units as a function of transducer counts. Below is shown an example MDT and the
effect of the Scale, Offset, Extend and Retract Limits:
The following formula summarizes the translation from transducer counts to Actual Position units:
If the Actual Position overflows the valid 16-bit position range, as described above, the Position
Overflow bit will turn on, forcing the axis to halt.
There are two main ways to calculate the Scale, Offset, and Prescale Divisor bits. Each method is
described below. Notice that both have automatic Calibration Utilities built into RMCWin. It is
recommended that these be used, but the underlying math is described below.
Method 1: P0/P1 Calculation
The simplest way is the physically measure the axis’s position at two points and read how many
counts the RMC reports at each position. If we call the two positions, in user position units, P0
and P1, and call the corresponding counts C0 and C1, the following two equations will give a
Scale and Offset. Notice that the Prescale Divisor is left out at this point; it is assumed to be 1:
Once the Scale is calculated, the Prescale Divisor can be calculated. The Prescale Divisor can
have values of 1, 2, 4, or 8. Because the Scale is always divided by the Prescale Divisor, you
essentially have a fractional scale. Pick the largest Prescale Divisor you can multiply the Scale by
and still be between 32768 and 32768. For example, suppose your Scale comes to 6324.70. The