Actual position, Counts, D.2.3 actual position – Delta RMC101 User Manual
Page 865: D.2.4 counts
Appendix D: Status Field Reference
D-3
During a move the path of the Target Position toward the Command Position will be the perfect
profile for the Actual Position to follow.
Note:
When an axis is stopped, the Target Position should be the same as the Command
Position unless an error or HALT has occurred (see Status).
Note:
When an axis is not in position Closed Loop Mode, Target Position is set to the Actual
Position.
Why Bother?
Knowing the relationship between the Target Position and Actual Position is key to tuning the
axis. The main goal in tuning the axis is to minimize the error between the Target and Actual
Positions. The plot function is a very useful visual aid in tuning the axis.
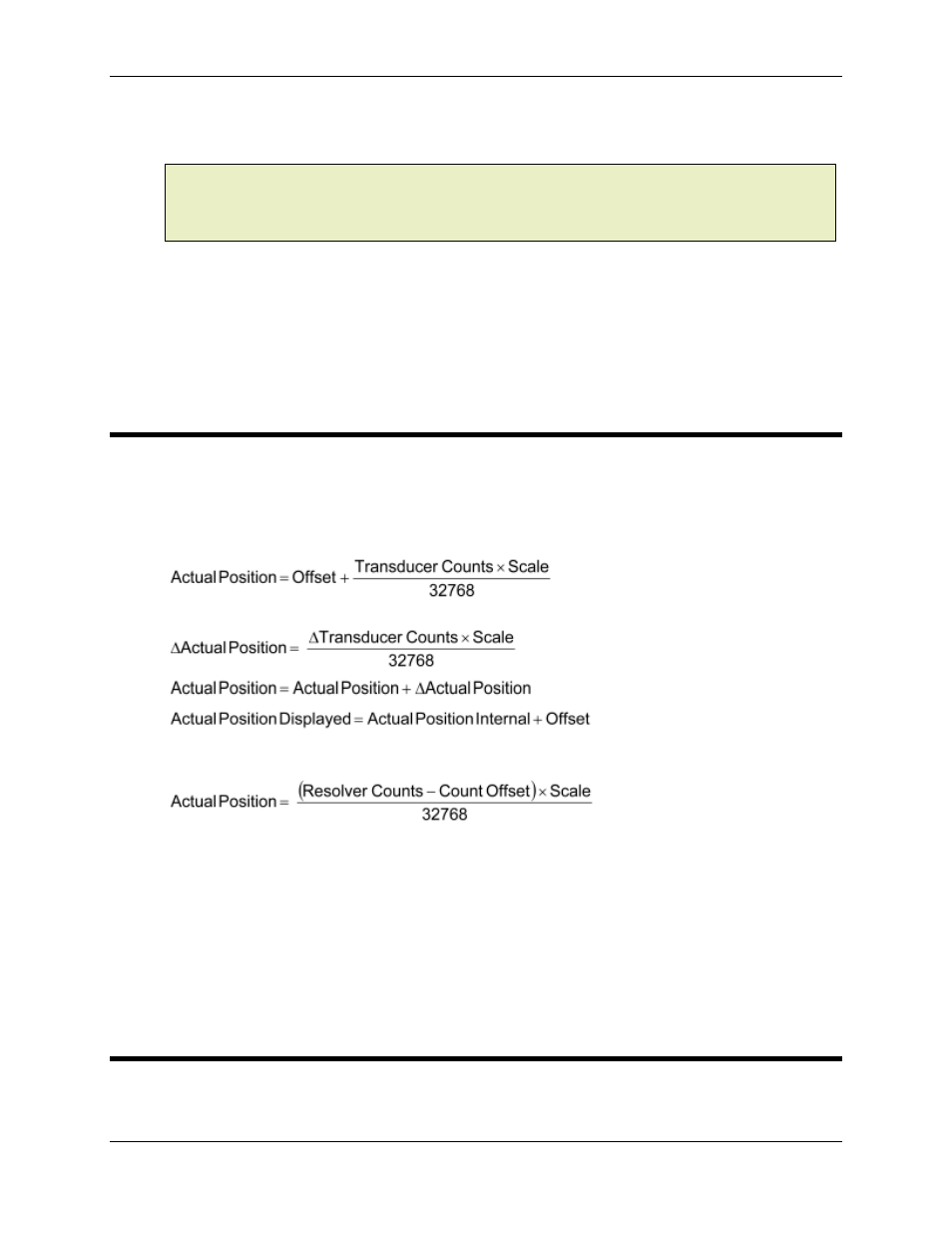
D.2.3 Actual Position
The Actual Position is the measured position of the axis at any moment. This position is updated
every control loop. The Actual Position is calculated from the Transducer Counts as follows:
For Analog, MDT, and SSI:
For Quadrature:
For Resolvers:
Why Bother?
Before applying drive or hydraulic power, make sure the target position is set to the actual
position with the Set Position/Pressure (c) command or Set Parameters (P) command. Otherwise
the axis will jump to the Target POSITION.
See Target Position.
D.2.4 COUNTS
This field holds a raw, non-scaled reading from the transducer. The exact meaning of this field
depends on the type of transducer used. It is useful to know the counts in order to set up or verify