Delta RMC101 User Manual
Page 627
Troubleshooting 7.2
Support and Troubleshooting
7-3
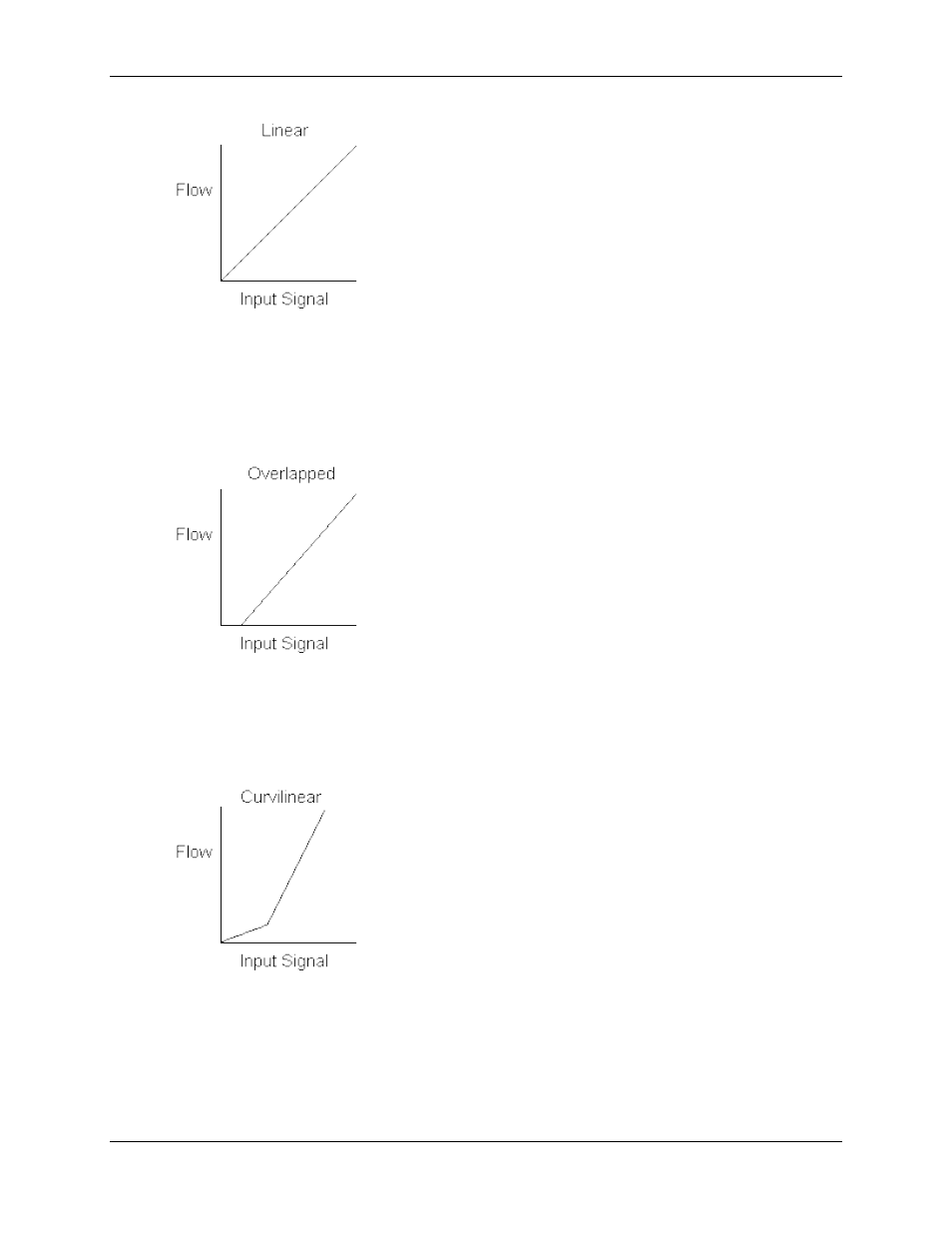
It is nonlinear when the output is not directly proportional to the input. You may find two types of
valve non-linearity:
Overlapped valves
- Oil does not start to flow through these valves until the spool has moved
some distance. This causes a dead band in the system, where small amounts of drive do not
produce motion. Overlapped valves are designed for manual and on/off type control and are not
suited for servo control. These valves should be replaced with non-overlapped valves.
Curvilinear valves
- The flow through these valves increases slowly as the input signal increases
for the first 20% of range. Beyond 20% the flow increases rapidly as the input increases. This is
equivalent to having two different gains for different signal levels. The low gain at low flow causes
poor response at slow speeds, and the high gain at high speed can cause instability. These
problems are more pronounced when heavy loads are moved by relatively small cylinders.
Slow-Response Valves
Valves with slow response cause the RMC to overcompensate for disturbances in the motion of
the system. Since the system does not respond immediately to the control signal, the RMC
continues to increase the drive signal. By the time the system begins to respond to the error, the
control signal has become too large and the system overshoots. The RMC then attempts to
control in the opposite direction, but again it overshoots. These valves can cause the system to