Acceleration limit (reference), C.6.9 acceleration limit (reference) – Delta RMC101 User Manual
Page 854
RMC100 and RMCWin User Manual
C-84
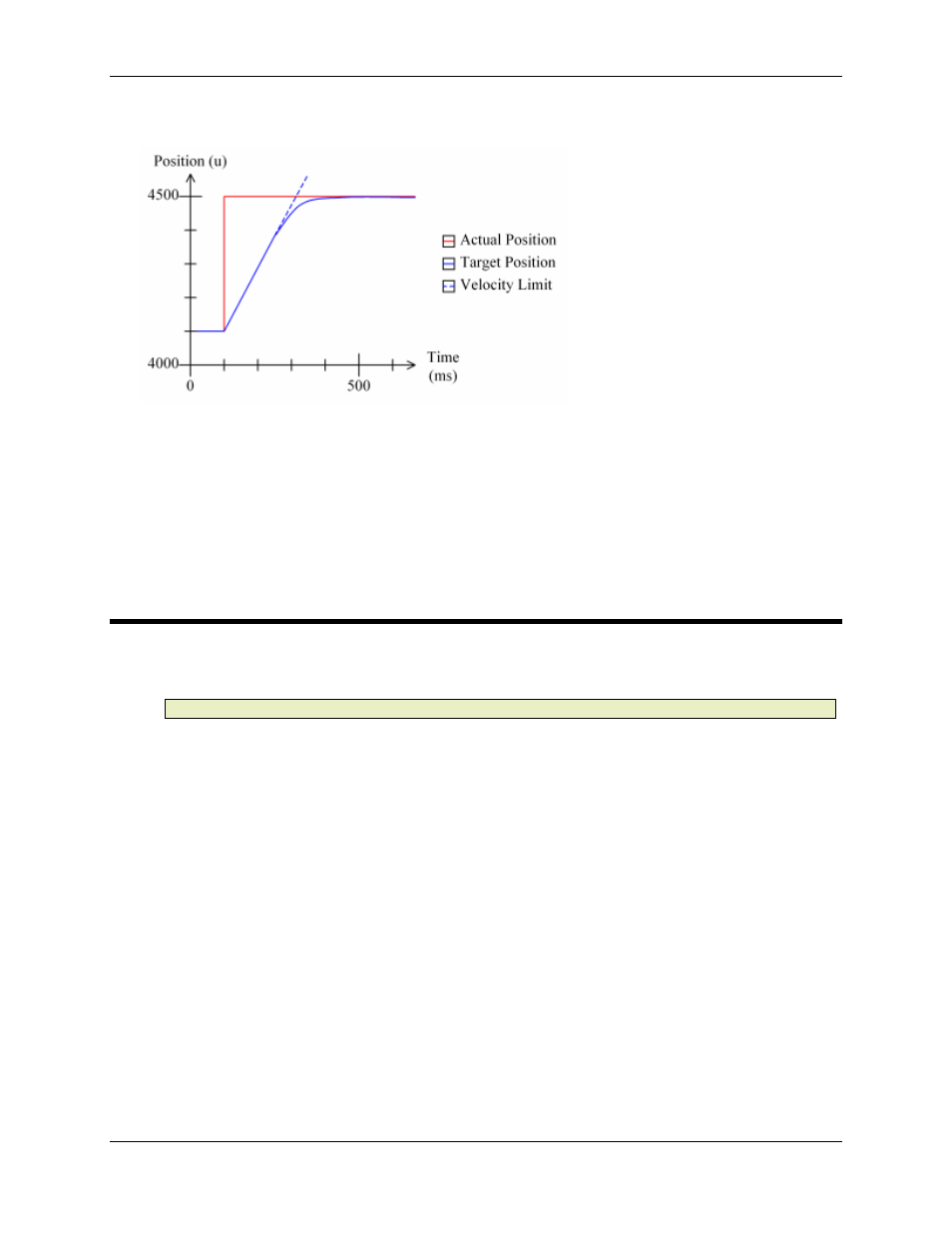
By lowering the Velocity Limit parameter, the Target Position changes to the following:
The Velocity Limit is ignored if the position filter is disabled through the Filter Time Constant
parameter.
This and the other position filter parameters can also be changed through the Reference (W)
command.
For details on reference axis filtering, see Reference Axis Filtering.
C.6.9 Acceleration Limit (Reference)
Default: 65,535
Range: 0 to 65,535 (position units per second per millisecond)
Note:
This parameter is available in RMC100 CPU firmware dated 20020222 or later.
This parameter is available on analog Position and Velocity Reference axes and configures the
position filter. For reference axes, the Actual Position status field reflects the actual reading from
the transducer, and the Target Position reflects the filtered position, after applying the Filter Time
Constant, Deadband, Velocity Limit, and Acceleration Limit parameters. This parameter limits the
rate of change of the Target Velocity to the this parameters value in position units per second per
millisecond.
For example, suppose that the Actual Position jumps from 4100 to 4500 position units. Using a
non-zero Filter Time Constant and the Velocity Limit, but with the Acceleration Limit set to a high
value (such as 65,535), the Target Position would be computed as follows: