Delta RMC101 User Manual
Page 197
Reference Axis Filtering 4.5
Controller Features
4-11
examples at the end of this topic:
• Filter Time Constant: This parameter controls the time constant itself for the filter. It is entered
in milliseconds. The cut-off frequency for the filter in Hertz is found by 1/2pt, where t is the time
constant is seconds. See Filter Time Constant for details on the parameter itself.
Note:
The Velocity Limit and Acceleration Limit are used only in conjunction with the Filter Time
Constant. If the Filter Time constant is zero, they will have no effect.
• Velocity Limit: This parameter limits the rate that the Target Position can change. See Velocity
Limit for details on the parameter itself.
• Acceleration Limit: This parameter limits the rate that the Target Velocity can change. It is
used to avoid a velocity discontinuity after an Actual Position step jump. See Acceleration Limit
for details on the parameter itself.
• Reference Deadband: This parameter is used to eliminate hunting (rocking back and forth
between values) of the Target Position when the input is at rest. This parameter specifies the
number of position units that the Actual Position must move before it affects the Target Position.
See Reference Deadband for details on the parameter itself.
Note:
The Reference Deadband should not be used unless the Filter Time Constant, Velocity
Limit, and Acceleration Limit are used.
The position parameters on analog reference axes are saved with the other axis parameters to
the Flash memory when the Update Flash (U) command is issued. However, the position filter
settings on all other axis types cannot be saved to Flash memory. Therefore, non-analog
reference axes can never start in the reference state on power-up.
The following examples demonstrate how these parameters affect the Target Position on a
reference axis.
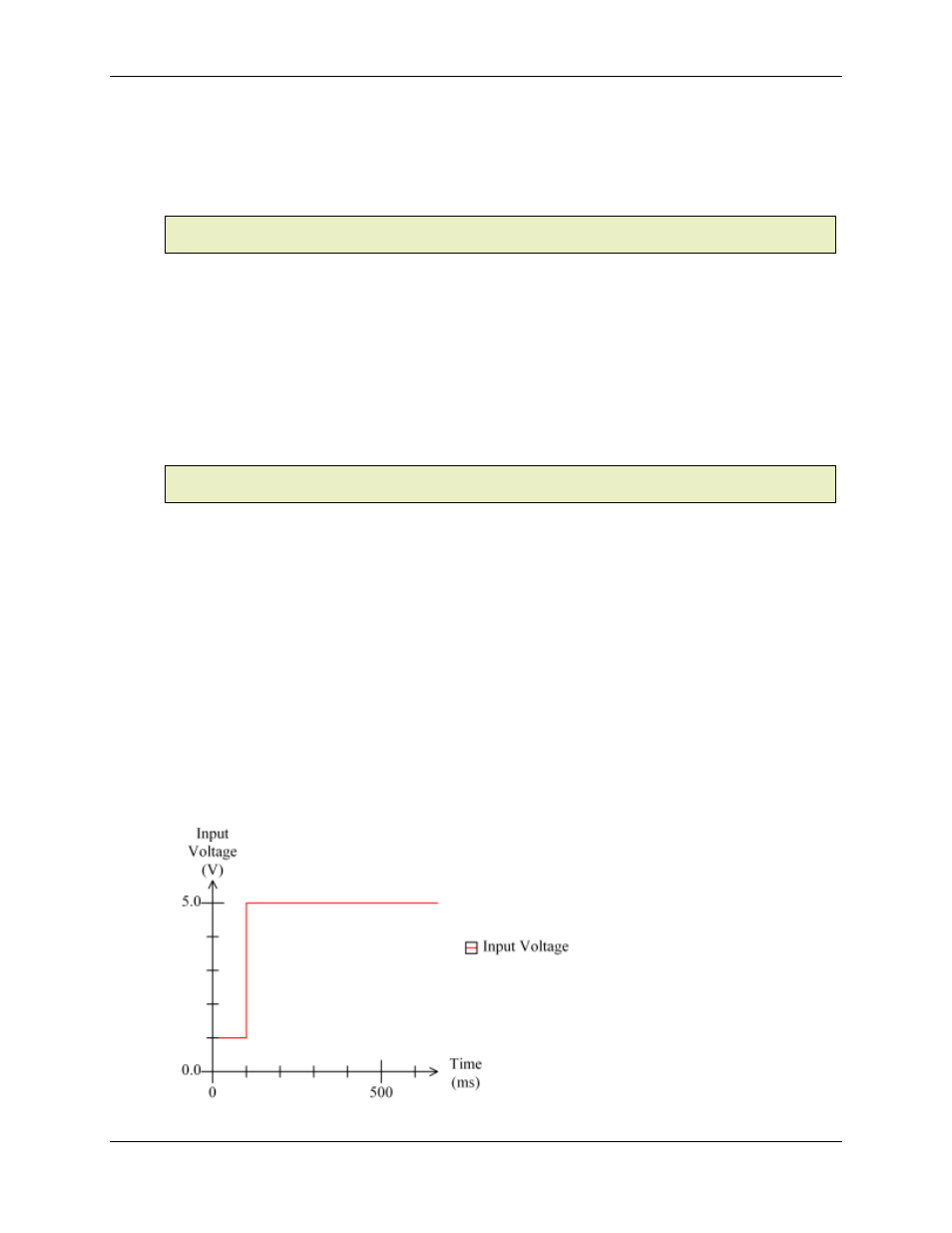
Example 1: Analog Reference with a Step Jump
In this application, the user wants to specify the command position through an analog signal. The
user wants the RMC to take care of both ramping the target position smoothly from one command
position to the next and controlling to the target position.
Suppose the input voltage is as follows: