Extend feed forward, C.1.14 extend feed forward – Delta RMC101 User Manual
Page 781
Appendix C: Parameter Field Reference
C-11
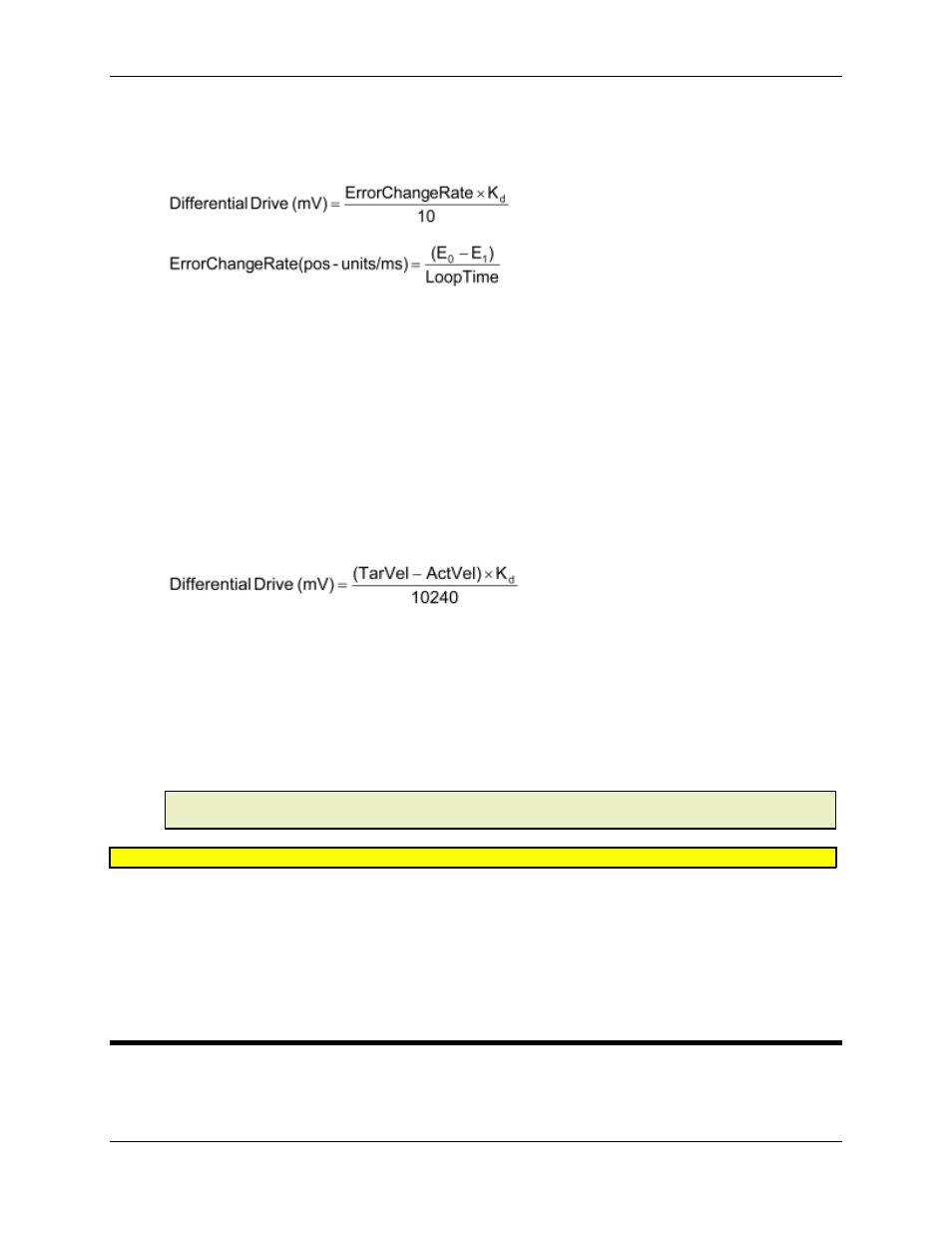
First, this is a gain multiplied by the current rate of change in the position error. The differential
drive, in millivolts is computed as follows:
where:
K
d
=
Differential Gain in mV/[pos-units/ms]
E
0
=
position error this control loop in position units
E
1
=
position error last control loop in position units
LoopTime =
RMC Control Loop Time in ms (1 or 2)
A second equivalent way of viewing this parameter is as the gain multiplied by the velocity error.
When looked at from this angle, the above equations become the following:
where:
K
d
=
Differential Gain in mV/[pos-units/s]
TarVel =
target velocity in pos-units/s
ActVel =
actual velocity in pos-units/s
Note:
The actual drive output may be reduced based on the values of the Extend Feed Forward
and Retract Feed Forward.
CAUTION:
To avoid oscillation during initial tuning start with values below 10.
Why Bother?
The Differential Gain field will usually be set to zero. Noisy or low-resolution feedback will limit the
amount the Differential Gain can be increased.
C.1.14 Extend Feed Forward
Default: 100
Range: 0 to 65535