7 maloperation of the drive, 10 diagnostics & error management – Lenze 8400 TopLine User Manual
Page 693
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
693
10
Diagnostics & error management
10.7
Maloperation of the drive
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
10.7
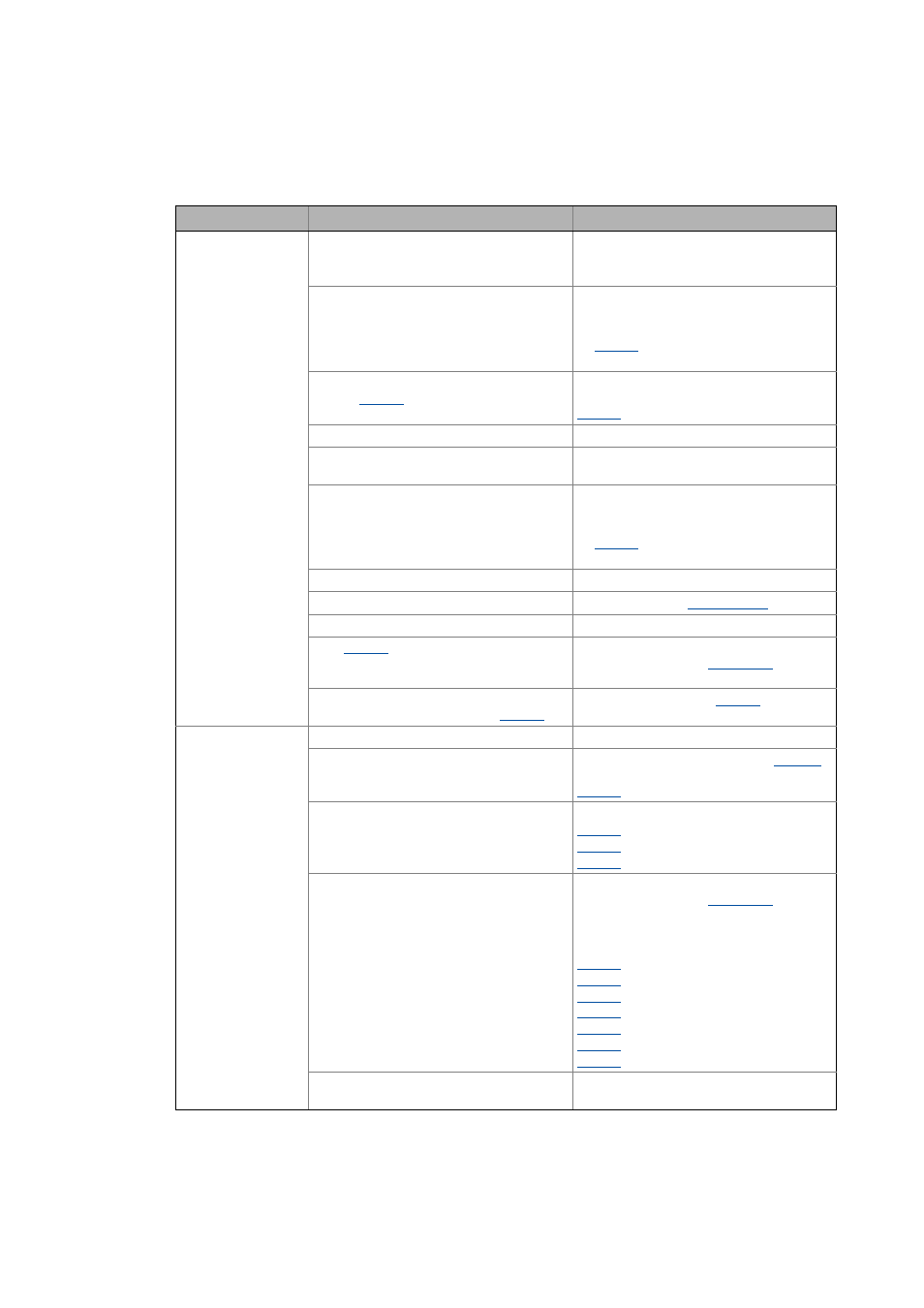
Maloperation of the drive
Maloperation
Cause
Remedy
Motor does not
rotate
DC-bus voltage is too low
• Red LED is blinking every 1 s
• Display in the keypad: LU
Check mains voltage
Controller is inhibited
• Green LED is blinking
• Display in the keypad:
Deactivate controller inhibit
• Note: Controller inhibit can be set via
several sources !
•
displays all active sources for
controller inhibit.
Automatic start is inhibited
(Bit 0 in
LOW/HIGH edge at RFR
If required, correct starting condition with
DC-injection braking (DCB) is active
Deactivate DC injection brake
Mechanical motor brake is not released
Release mechanical motor brake manually or
electrically
Quick stop (QSP) is active
• Display in the keypad:
Deactivate quick stop
• Note: Quick stop can be set via several
sources!
•
displays all active sources for
quick stop.
Setpoint = 0
Select setpoint
JOG frequency = 0 at activated JOG setpoint Set JOG setpoint in
Fault active
Clear fault
= 4, "SLVC: Vector control" has
been set, but no motor parameter
identification has been carried out.
Execute automatic motor parameter
identification with the
device
command
Assignment of several mutually exclusive
functions with a signal source in
Motor rotates
irregularly
Motor cable is defective
Check motor cable
Maximum motor current in motor or
generator mode is set too low
Adjust settings to the application:
Imax in motor mode
: Imax in generator mode
Motor is underexcited or overexcited
Check parameterisation:
: Motor control
: VFC: V/f base frequency
: VFC: Vmin boost
Rated motor data (stator resistance, speed,
current, frequency, voltage) and cos ϕ
and/or magnetising inductance is not
adapted to the motor data
Execute automatic motor parameter
identification with the
device
command
- or -
Adjust motor parameters manually:
: Motor stator resistance
: Rated motor speed
: Rated motor current
: Rated motor frequency
: Rated motor voltage
: Motor cosine phi
: Motor magnetising inductance
Motor windings are wired incorrectly
Reverse from star connection to delta
connection