9basic drive functions (mck) – Lenze 8400 TopLine User Manual
Page 603
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
603
9
Basic drive functions (MCK)
9.4
Basic settings
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
9.4.8
Setting or activation of maximum jerk for traversing profiles
This function extension is available from version 14.00.00!
Basics of the "maximum jerk" function
A change over of a traversing profile within an acceleration or deceleration ramp to a sequence
profile which has a lower jerk than the traversing profile from the calculation of the new
acceleration and S-ramp time causes an increase of the speed which may be not wanted for process
technology reasons. The reason is that the new jerk reduces the acceleration in a too long time
period which generates a too high speed.
As a remedy, the "maximum jerk" function can be activated which integrates the currently pending
acceleration into the acceleration of the new traversing profile or to zero.
Parameterising the "maximum jerk" function
The "maximum jerk" function can be individually activated for the operating modes "
",
"
" and "
" via the following setting parameters:
When the function is activated, the maximum jerk is calculated from the higher value of both
acceleration values and the lower value of both S-ramp time values based on the acceleration and
S-ramp time of the current and sequence profile. This maximum jerk is then used for an accelerated
drive in order to reduce the acceleration to 0 or to the acceleration of the sequence profile.
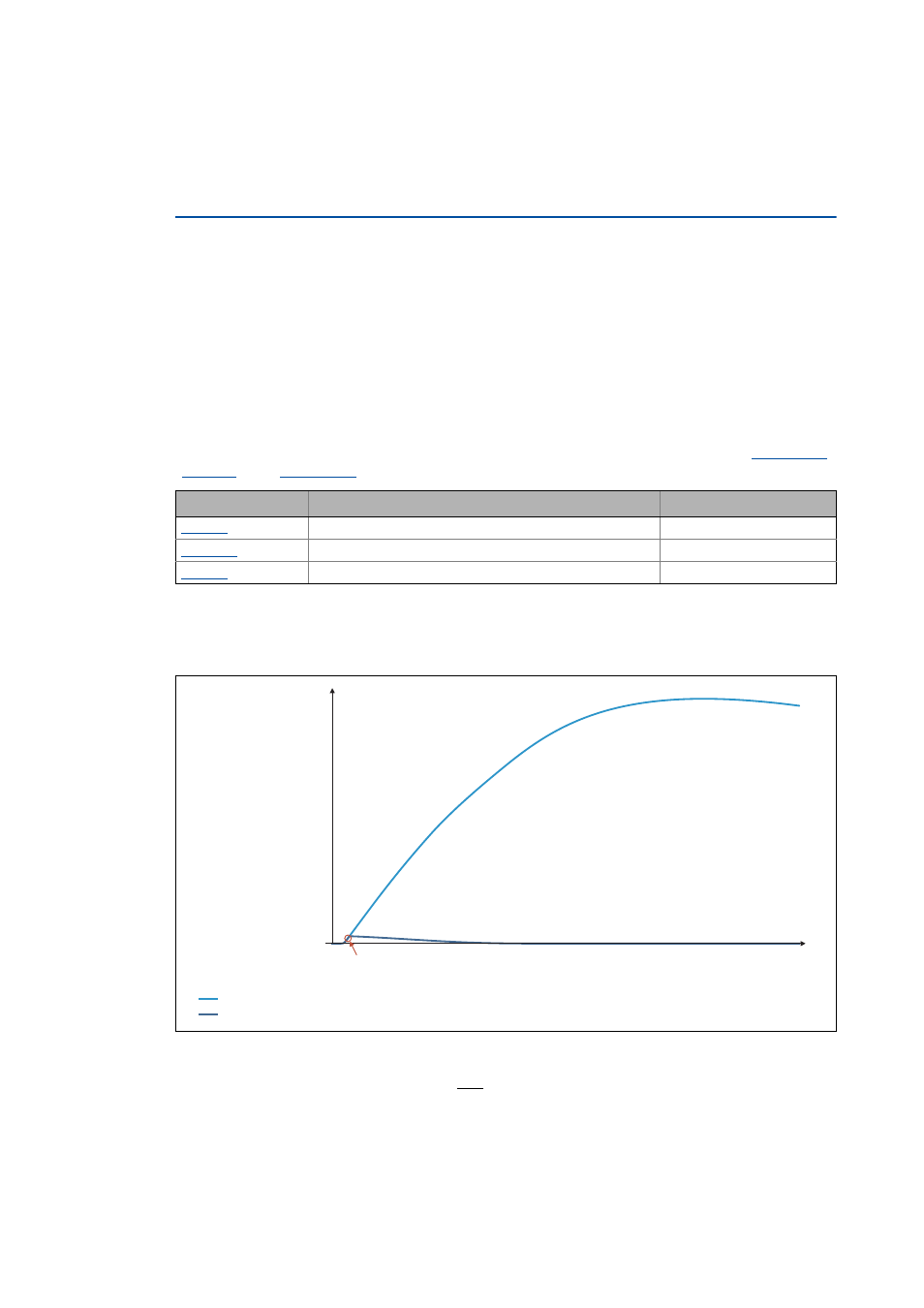
[9-23] Example: Behaviour during transition to sequence profile with accelerated drive
If the sequence profile is started with a non-accelerated drive, the parameters of the sequence
profile are continued to be used for the jerk calculation without maximum comparison to the
current profile.
Parameter
Info
Lenze setting
- bit 5
Maximum jerk for positioning on/off
Off
- bit 5
Maximum jerk for homing on/off
Off
- bit 5
Maximum jerk for manual jog on/off
Off
Transition to sequence profile
Speed characteristic without "maximum jerk" setting
Speed characteristic with "maximum jerk" setting
t
0
nSpeedSetValue_a [%]