5motor control (mctrl) – Lenze 8400 TopLine User Manual
Page 210
5
Motor control (MCTRL)
5.8
Sensorless control for synchronous motors (SLPSM)
210
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
The motor model-based speed monitoring requires a rotating machine. Thus, the operational
performance of the sensorless control for synchronous motors is divided into two categories:
1. Open-loop controlled operation (|n
setpoint
| < n
C00996
)
• In the range of low speeds, the speed of a synchronous motor is not possible. Thus, only an
adjustable and constant current is injected that enables an acceleration.
2. Closed-loop controlled operation (|n
setpoint
| > n
C00996
)
• In this range, the rotor flux position and the speed are reconstructed via an observer. The
control is carried out field-oriented. Only the current is injected that is needed for the
required torque.
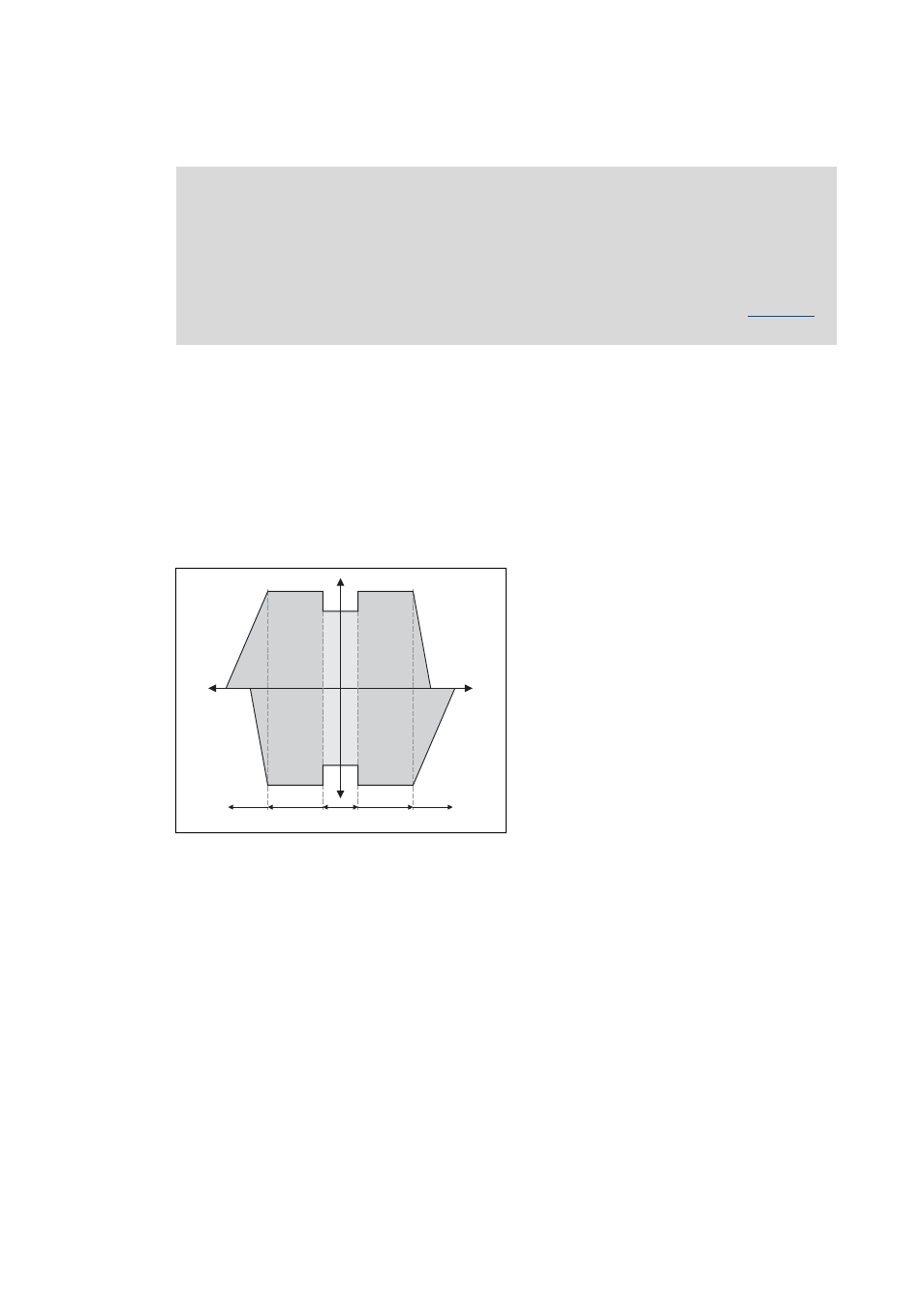
[5-13] Operating ranges of the sensorless control for synchronous motors
The sensorless control for synchronous motors has similar advantages for the closed-loop
controlled operating range and the servo control (SC) for synchronous motors. Compared to
asynchronous motors, there are the following advantages:
• Higher power density of the motor
• Higher efficiency
• Limitation of the maximum torque in motor mode and generator mode in closed-loop
operating range
• Implementation of simple positioning
Note!
Currently, the sensorless control does not contain a flying restart function that enables
a synchronisation of the controller to a rotating machine.
• Thus, we recommend taking measures for preventing overvoltages at operation in
generator mode (e.g. brake resistor).
• By any means, the delay time for the "DC-bus overvoltage" error trigger in
must be set to 0 s.
Operation in motor mode (CW rotation)
Operation in generator mode (CCW rotation)
Operation in motor mode (CCW rotation)
Operation in generator mode (CW rotation)
Field weakening (in preparation)
Closed-loop controlled operation
Open-loop controlled operation
0
1
2
3
M
n