1 internal interfaces, Internal interfaces, 9basic drive functions (mck) – Lenze 8400 TopLine User Manual
Page 656
9
Basic drive functions (MCK)
9.12
Holding brake control
656
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
9.12.1
Internal interfaces
In the function block editor, the
system block provides the following
internal interfaces for the basic function "holding brake control":
Inputs
Identifier
Data type
Information/possible settings
bMBrakeRelease
BOOL
Releasing/applying the brake in connection with the selected operating mode
FALSE Apply brake.
• During automatic operation, the internal brake logic controls the
brake.
TRUE Release brake manually (forced release).
• Note!
The brake can also be released if the controller is inhibited!
• During automatic operation, the internal brake logic is
deactivated and the brake is released (supervisor operation). If a
controller inhibit has been set by the brake control, it will be
deactivated.
• In semi-automatic operation, the brake is released including
feedforward control.
bMBrakeStartValue2
BOOL
Selection of the torque feedforward control value
Feedforward control of the motor before release
FALSE Starting value 1 is active (see the following figure).
TRUE Starting value 2 is active (see the following figure).
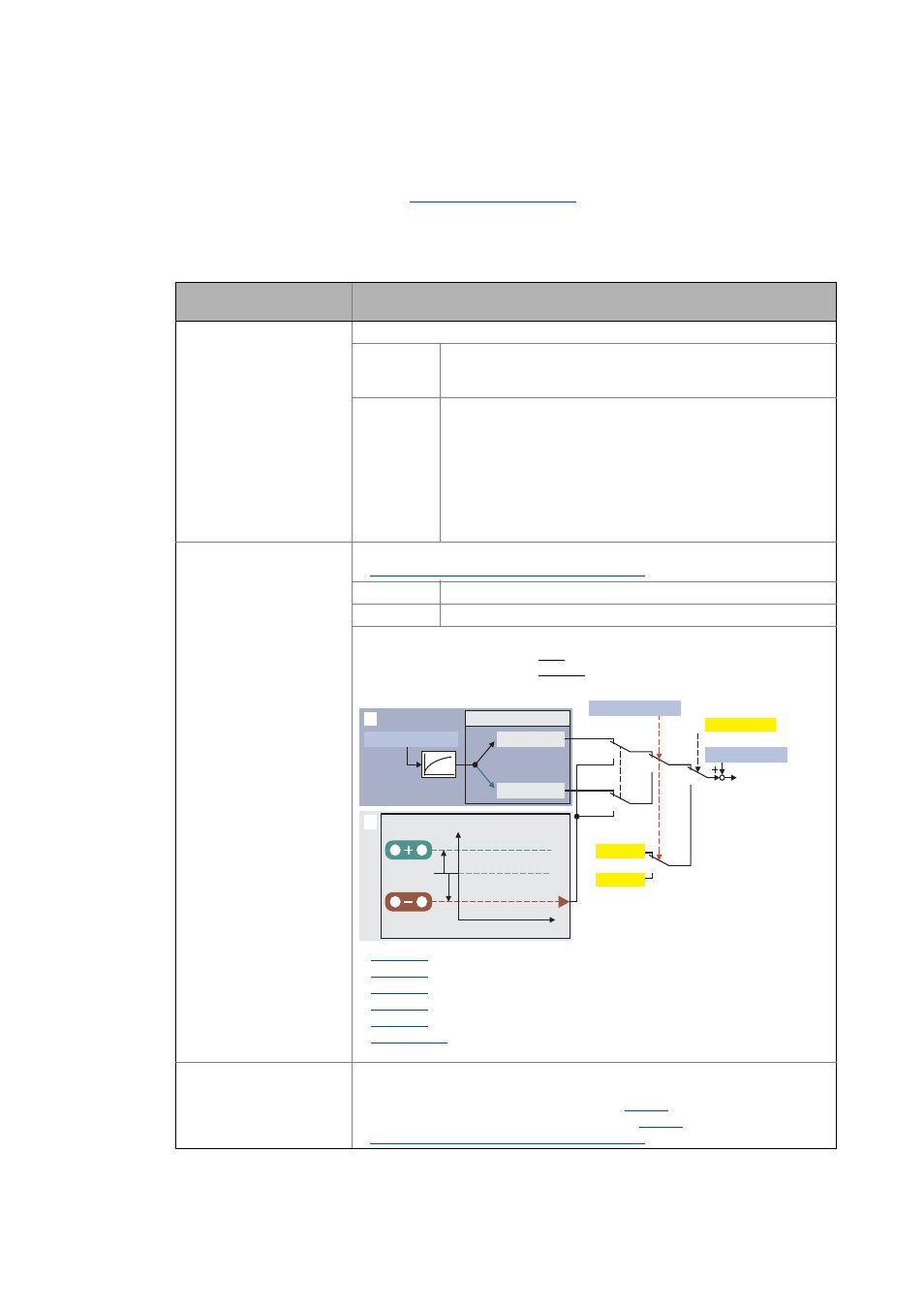
Creation of the feedforward control value for the release process of the brake:
Signal path for motor control with feedback
Signal path for motor control without feedback
Feedforward control value
: Switching threshold
: Hysteresis for release
: Hysteresis for application
: Starting value 1 for manual feedforward control
: Starting value 2 for manual feedforward control
: Selection of the feedforward control value (automatic/manual
selection)
nMBrakeAddValue_a
INT
Additive feedforward control value (speed or torque) in [%] for torque feedforward
control when the respective control mode is started
• For speed control: 100 % ≡ reference speed (
)
• For torque control: 100 % ≡ maximum torque (
)
Feedforward control of the motor before release
0
t
nSpeedSetValue_a
Release brake
Close brake
bBrakeStartValue2
TorqueValue2
(+)nSetSpeed
(-)nSetSpeed
C02581/4
C02581/5
0
2
TorqueValue1
C02582 - Bit 4
nBrkAddValue_a
nMotorTorqueAct_a
T = 4 ms
S&H (Retain)
1
0
0
1
1