19 function library – Lenze 8400 TopLine User Manual
Page 1499
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
1499
19
Function library
19.1
Function blocks
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
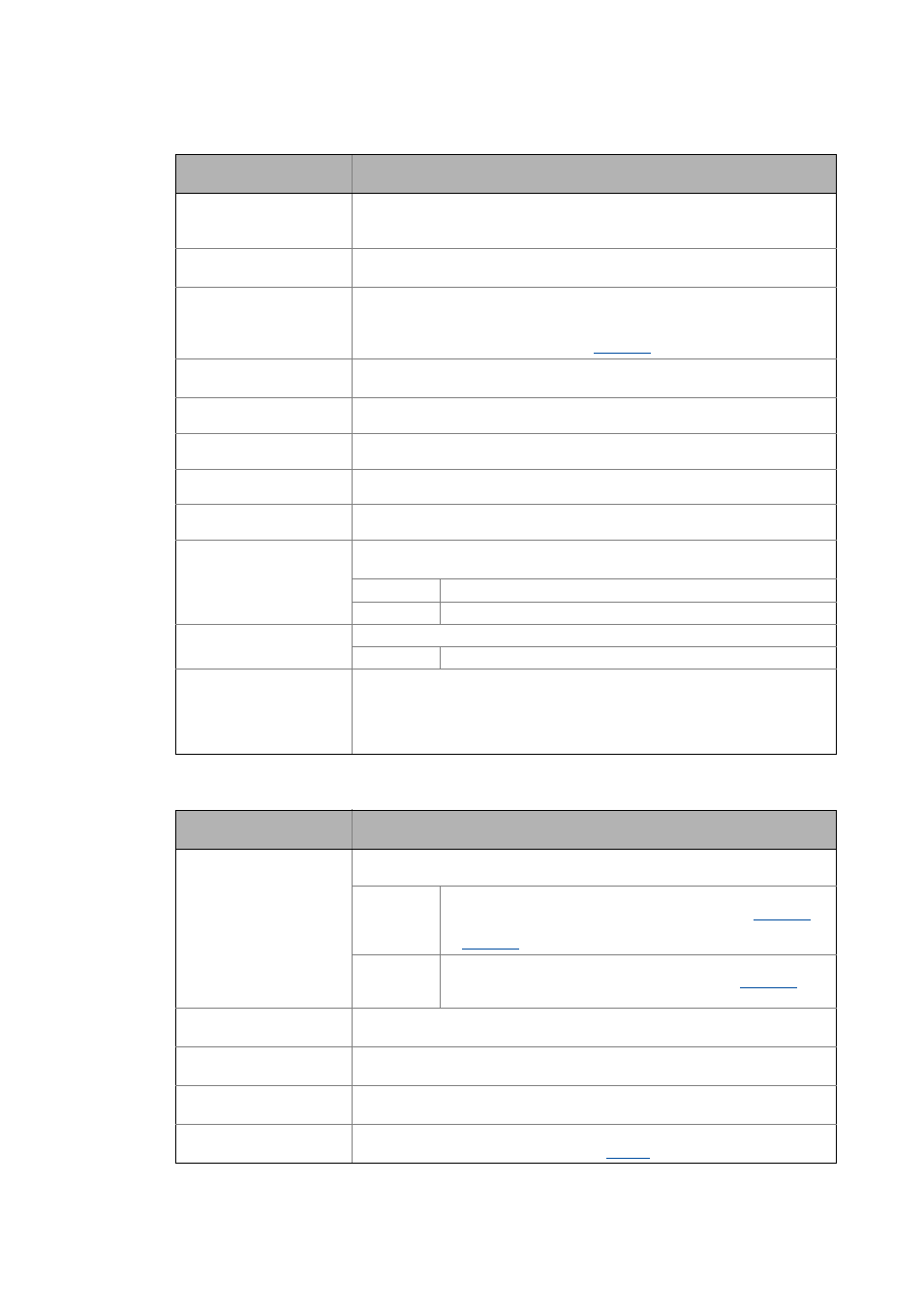
Outputs
nSpeedTrim_v
INT
Speed trimming in [increments/ms]
• Scaling: 16384 ≡ 15000 rpm
• Speed trimming via this input is more precise.
dnPosOffset_p
DINT
Angular offset in [increments]
• Scaling: A motor revolution is mapped with 65536 increments or steps.
nPositionTrimming
INT
Angular trimming in [increments]
• Scaling: A motor revolution is mapped with 65536 increments or steps.
• When analog values are selected: 100 % ≡ 1/4 revolution ≡ 16384 increments
• The setting range can be extended via
.
nSet_v
INT
Speed setpoint
• Scaling: 16384 ≡ 15000 rpm
wGainNum
WORD
Stretch factor (numerator)
wGainDenom
WORD
Stretch factor (denominator)
wGearNum
WORD
Gearbox factor (numerator)
wGearDenom
WORD
Gearbox factor (denominator)
bSetActIntegrator
BOOL
Equalise angle integrators (current position = set position)
• This input has a higher priority than the bResetAllIntegrators input.
FALSETRUE Set following error dnDeltaPos_p = 0.
TRUE Equalise angle integrators.
bResetAllIntegrators
BOOL
Reset angle integrators
TRUE Positional deviation, dnPosSetOut_p and dnDeltaPos_p are set to "0".
nNAct_v
INT
Actual value in [increments/ms] for calculating the actual position
• Scaling: 16384 ≡ 15000 rpm
• If this input is connected or assigned to an output, the following error created
from integration of this input and difference with the set position is used for the
following error compensation in case of mark correction.
Identifier
Data type
Value/meaning
bAck
BOOL
Status signal of the internal angle correction (or control signal for external angle
correction)
TRUE Status signal "Synchronising is executed"
• When the external angle correction is deactivated (
-
bit 2 = "0") and a ramp for the angle compensation is set in
.
FALSETRUE Control signal "Start external angle correction"
• When the external angle correction is activated (
bit 2 = "1") and the angular offset is measured.
dnPosDiffOut_p
DINT
Angular offset in [increments]
• Difference between two positions measured by means of touch probe.
nSetGain_v
INT
Speed setpoint in [increments/ms] evaluated with stretch factor
• Scaling: 16384 ≡ 15000 rpm
nSetGearTrim_v
INT
Speed setpoint in [increments/ms] evaluated with stretch factor and gearbox factor
• Scaling: 16384 ≡ 15000 rpm
nSetGearTrim_a
INT
Speed setpoint in [%] evaluated with stretch factor and gearbox factor
• Scaling: 16384 ≡ 100 % reference speed (
)
Identifier
Data type
Information/possible settings