5 ta "switch-off positioning, Ta "switch-off positioning, 8technology applications – Lenze 8400 TopLine User Manual
Page 519
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
519
8
Technology applications
8.5
TA "Switch-off positioning"
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
8.5
TA "Switch-off positioning"
The basic principle of this technology application is to travel to a switch-off sensor (e.g. a limit
switch) in a speed-controlled manner and to stop as close as possible at this position. Unlike other
positioning controls, the switch-off positioning neither has a position feedback nor calculates the
path in advance. Thus, the accuracy that can be achieved depends on various factors such as the
speed at which the switch-off sensor is advanced.
In addition, a pre-switch off can be implemented which requires a sufficient number of unassigned
digital inputs on the controller which can be used to connect other sensors for the additional stop
positions. These sensors effect a reduction in speed before the last switch-off sensor is reached.
Features
• Pre-configured control modes for terminals and bus control (with predefined process data
connection to the fieldbus)
• Free configuration of input and output signals
• Offset, gain, and negation of main setpoint & additional setpoint
• Up to 15 fixed setpoints for speed and ramp time
• Adjustable setpoint ramp times
• Freely selectable, variable ramp shape
• Automatic holding brake control
• Quick stop (QSP) with adjustable ramp time
• Integrated, freely available "GeneralPurpose" functions:
Analog switch, arithmetic, multiplication/division, binary delay element, binary logic, analog
comparison, D-flipflop
• Interface to the safety module (optional)
• Integration of encoder feedback
• Switch-off sensor management for the implementation of a pre-switch off
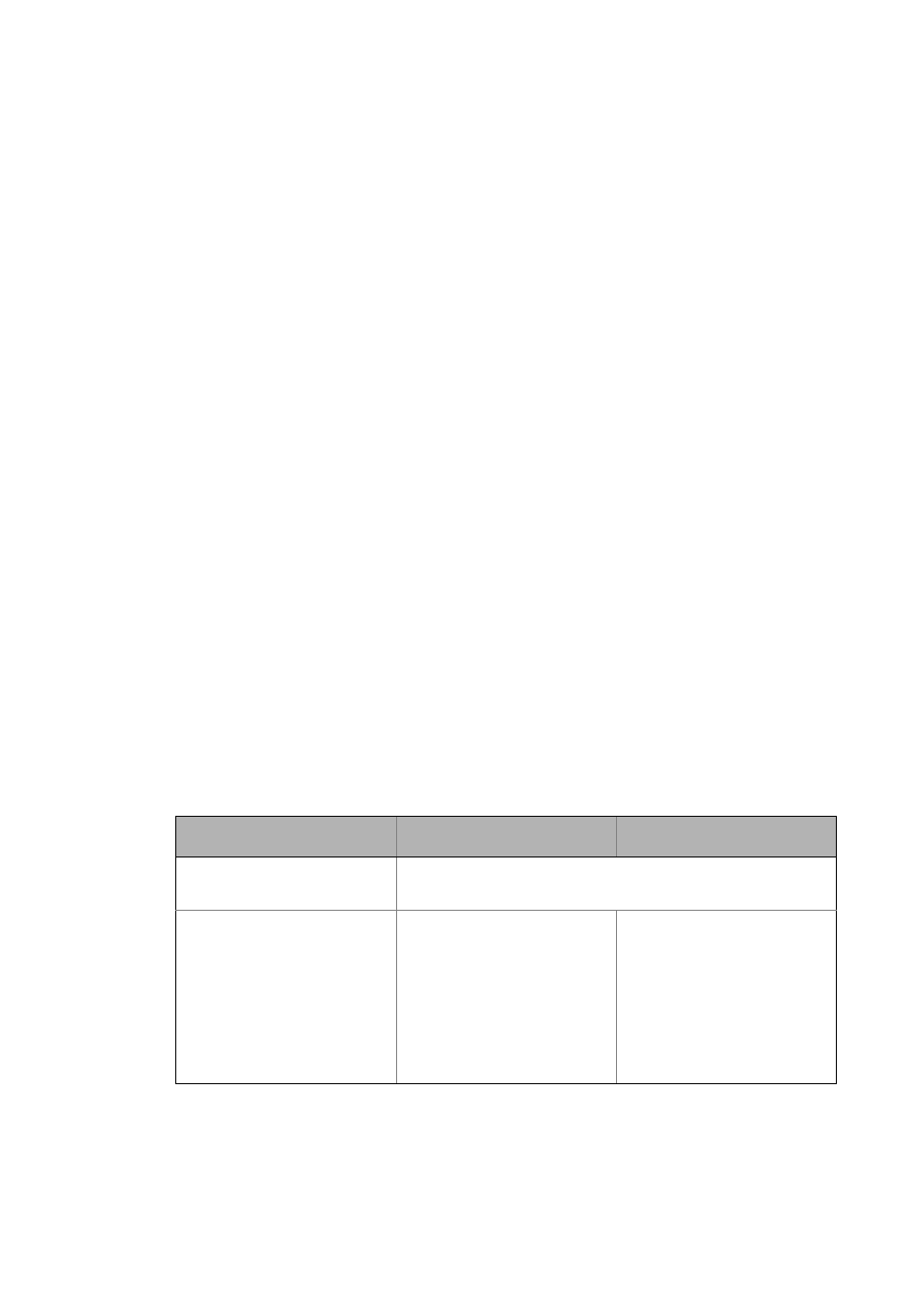
Decision criteria
Criteria
Switch-off positioning with constant
load
Switch-off positioning with variable
load
Operating mode
V/f characteristic without speed sensor.
Alternatively for large breakaway torques: Use of a sensorless vector control
(only applicable for horizontal movements).
Limit switch evaluation
One limit switch is required per
direction of movement.
When the limit switch is reached, the
drive is brought to a standstill led by
the deceleration ramp or the QSP
ramp.
One limit switch and an initiator are
required for fast/slow changeover
per direction of movement.
When the initiator has been reached,
the speed of the drive is reduced to a
creeping speed (fixed setpoint 2) in a
controlled way.
When the limit switch is reached, the
drive is brought to a standstill led by
the deceleration ramp or the QSP
ramp.