C02865 | mctrl: special settings, C02865/1, Bit 6 of – Lenze 8400 TopLine User Manual
Page 1286: C02865, Has no effect on the, Must be set, C2865/1, 17 parameter reference
17
Parameter reference
17.2
Parameter list | C02865
1286
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
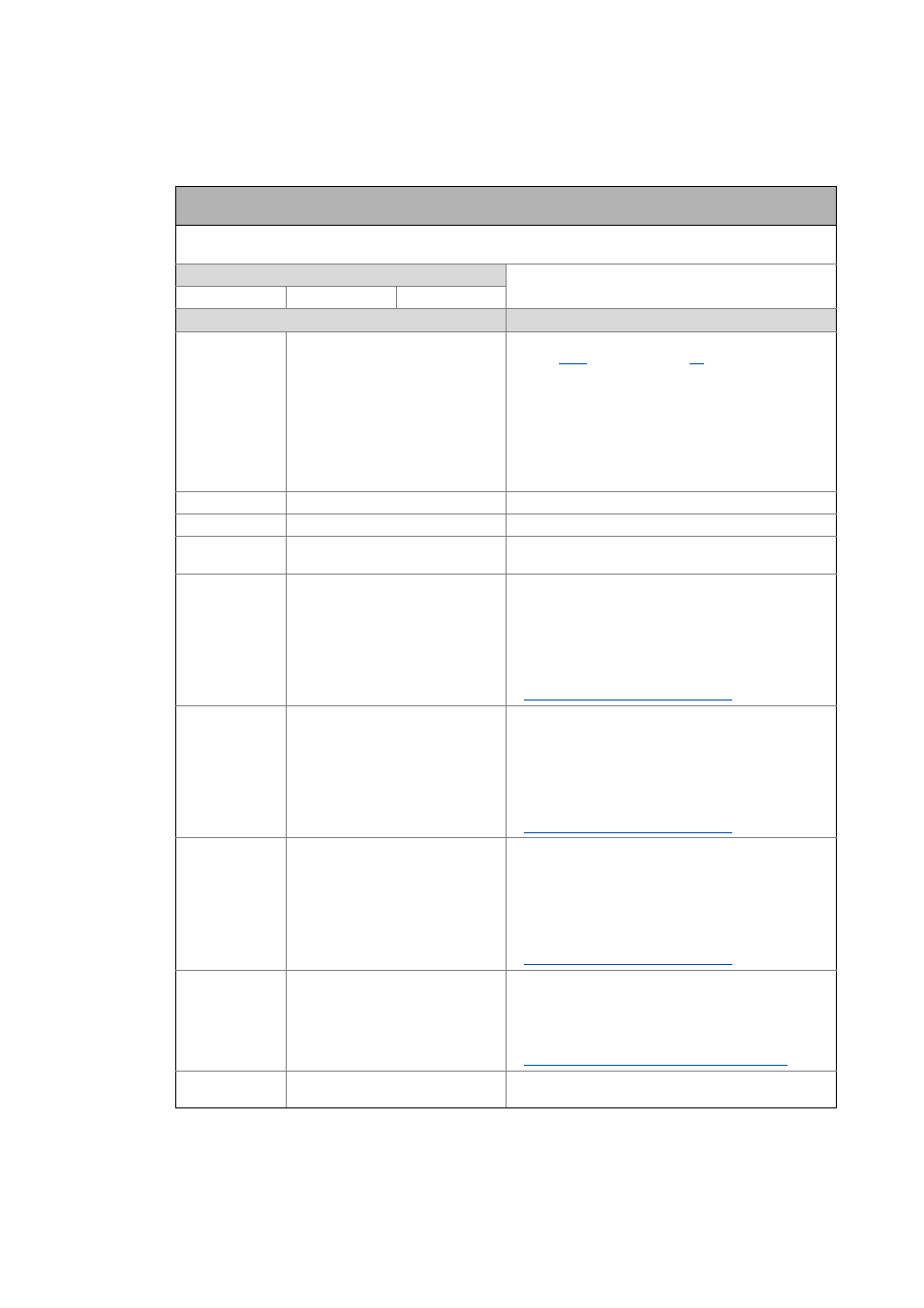
C02865
Parameter | Name:
C02865 | MCTRL: Special settings
Data type: UNSIGNED_16
Index: 21710
d
= 54CE
h
From version 12.00.00
Activation of special functions of the internal motor control
Setting range
(min. hex value | max. hex value)
0x0000
0xFFFF
Value is bit-coded:
Info
Bit 0 No TorqueLimit if TorquemodeOn
From version 12.00.00 onwards
: If sensorless vector
control (
) or servo control (
) are used, in the
"torque control with speed limitation" mode the torque
limitation via nTorqueMotLimit_a and
nTorqueGenLimit_a is also active to limit the torque
setpoint.
If you want to deactivate the torque limitation to retain
the former function, set bit 0 to "1".
0 ≡ Torque limitation is active
1 ≡ Torque limitation is not active
Bit 1 250ms IMP before DCB
Bit 2 1000ms IMP before DCB
Bit 3 DCB: Current controller and C036
app. to C088
Bit 4 Motorident.: No calculation C73 C75
C76 C77 C78
From version 12.00.00 onwards
: Following successful
motor parameter identification, the current controller
and field controller parameters are calculated as well.
If these parameters are not to be calculated, bit 4 must
be set to "1".
0 ≡ Calculate parameter
1 ≡ Do not calculate parameter
Automatic motor data identification
Bit 5 Motorident.: Calculation C70 C71
C72
From version 12.00.00 onwards
: Following successful
motor parameter identification, the speed controller
parameters can automatically be calculated as well.
If these parameters are to be calculated, bit 5 must be set
to "1".
0 ≡ Do not calculate parameter
1 ≡ Calculate parameter
Automatic motor data identification
Bit 6 Motorident.: Calculation C11 C22
C497 C966 C982
From version 12.00.00 onwards
: Following successful
motor parameter identification, further controller
parameters can be calculated automatically.
If these parameters are to be calculated, bit 6 must be set
to "1".
0 ≡ Do not calculate parameter
1 ≡ Calculate parameter
Automatic motor data identification
Bit 7 Brake chopper off in case of pulse
inhibit
From version 14.00.00
0 ≡ No response of the brake chopper in case of pulse
inhibit.
1 ≡ In case of pulse inhibit, the brake chopper is
permanently switched off without any delay.
Braking operation/brake energy management
Bit 8 DC-bus supply with DC charging
connection