5motor control (mctrl) – Lenze 8400 TopLine User Manual
Page 295
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
295
5
Motor control (MCTRL)
5.13
Monitoring
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Adjustment of the motor utilisation meter
The motor utilisation meter for indicating the motor load in
begins to count when the
apparent motor current (
) is greater than the motor overload setting (
).
The overload threshold (
) is to be set as follows:
• If you reduce
starting from the calculated value, the motor utilisation meter will already
be counted up before the rated overload threshold is reached.
• If you increase
starting from the calculated value, the motor utilisation meter will not
be counted up until the rated overload threshold is reached.
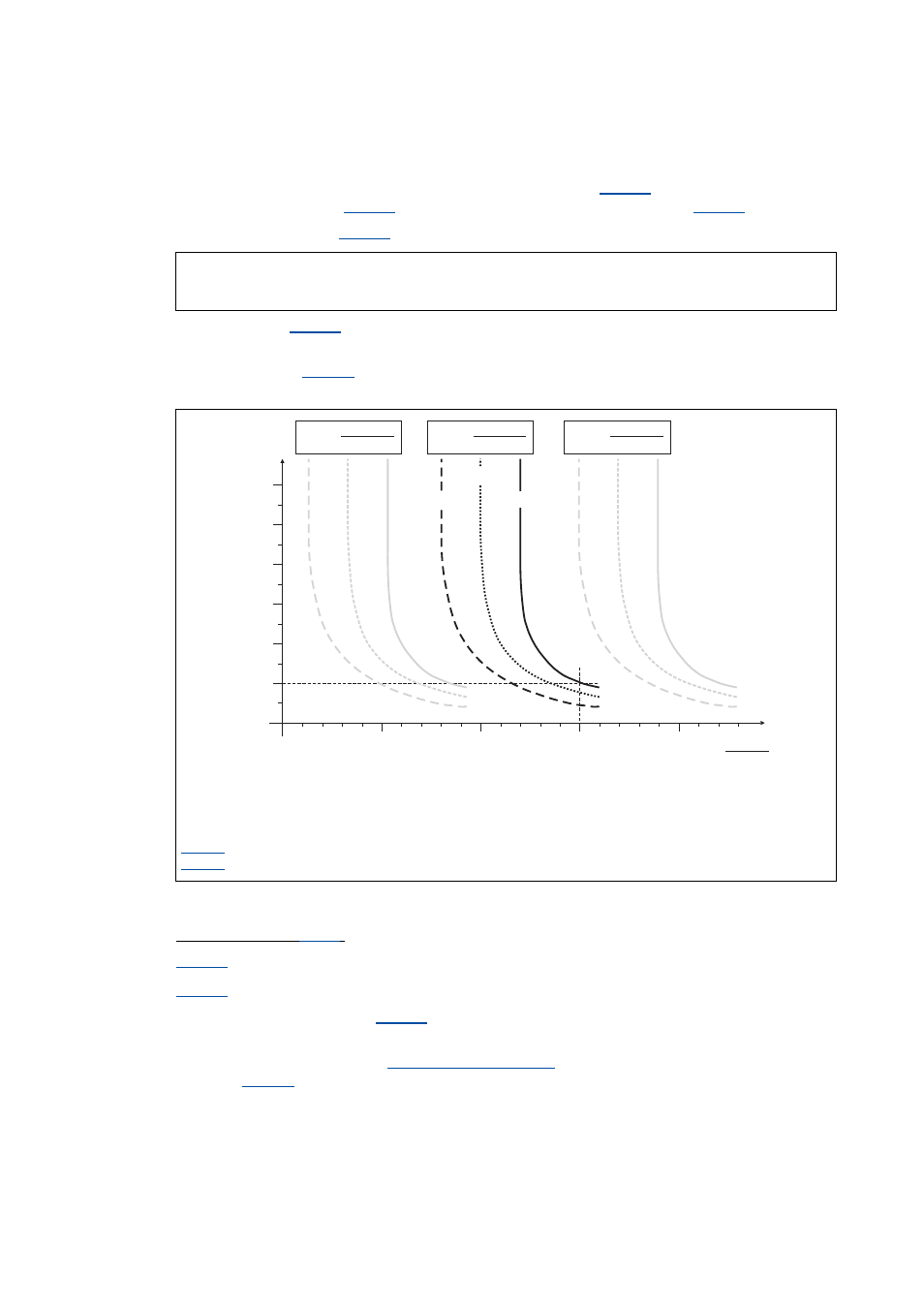
[5-33] Tripping characteristic of the I
2
xt monitoring
Example in Figure
:
= I
r
/I
rated
x 100 %
= 150 % rated motor current
• After approx. 60 seconds,
has reached the final value (100 %) at output frequencies
f > 40 Hz.
• The controller outputs the "
" error message and triggers the response
(default setting: "Warning").
f: Output frequency
t: Release time
I
N
: Rated device current at a switching frequency of f = 8 kHz
I
r
: Rated motor current (see nameplate of motor)
: Apparent motor current
: Motor overload setting
C00120
Rated motor current (C00088)
Rated device current (C00098)
------------------------------------------------------------------------------
100 %
⋅
=
60
180
240
300
360
t [s]
0.5
0
0
1.0
1.5
2.0
C00054
I
r
120
f = 0 Hz
f = 20 Hz
f > 40 Hz
I x 100 %
I
r
N
C00120 <
I x 100 %
I
r
N
C00120 =
I x 100 %
I
r
N
C00120 >