9basic drive functions (mck) – Lenze 8400 TopLine User Manual
Page 639
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
639
9
Basic drive functions (MCK)
9.8
Positioning
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
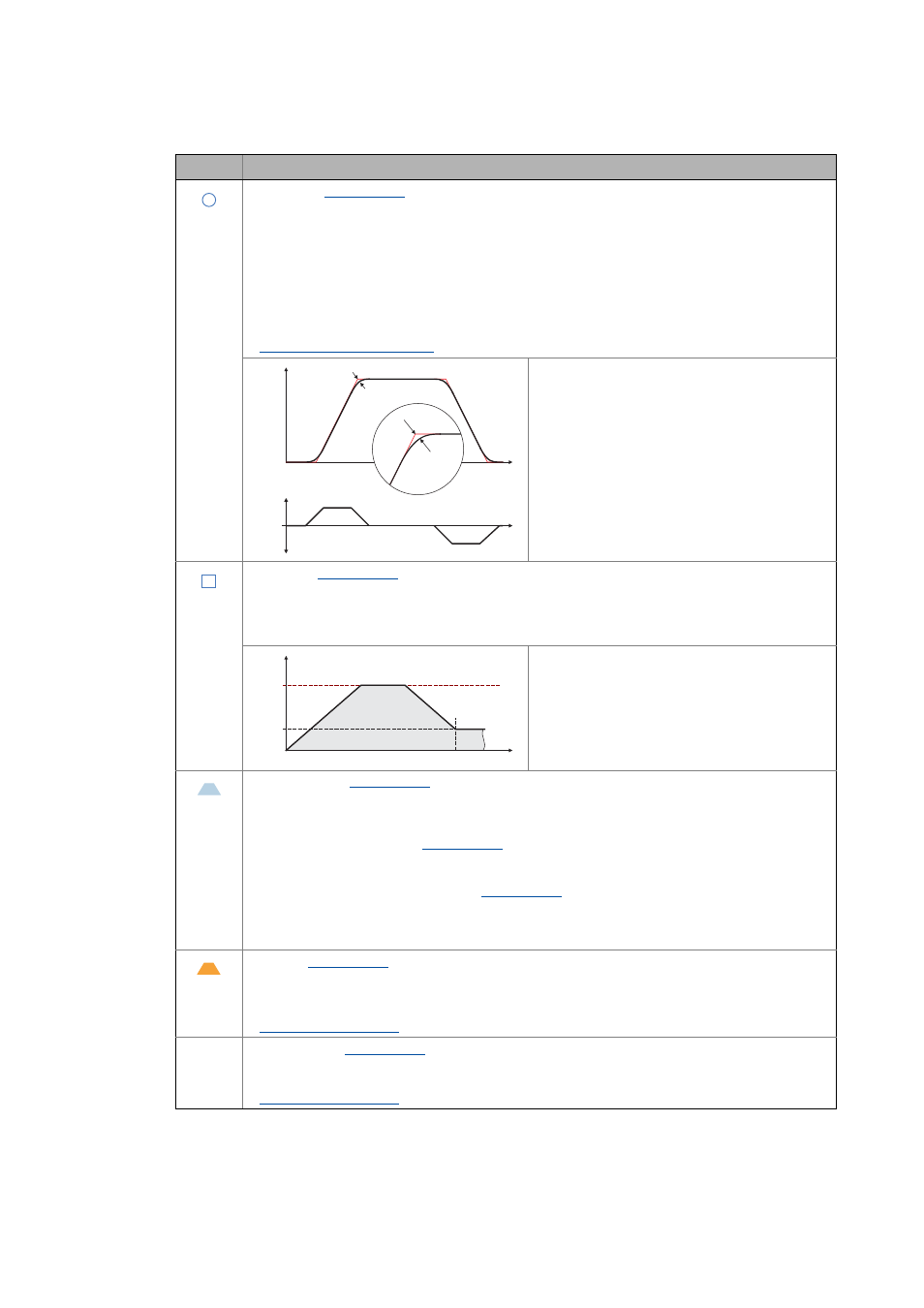
S-ramp time (
)
Due to stipulation of an S-ramp time for a profile, the profile is executed with S-shaped ramps, i.e.
acceleration and braking processes are initiated smoothly in order to reduce jerk and thus the stress on
the drive components.
• The acceleration/deceleration stipulated in the profile is not achieved until after the specified S-
ramp time.
• This kind of acceleration/deceleration is needed for sensitive machine parts with a certain amount
of play.
• The unavoidable consequence of the slower increase in acceleration in the case of the S profile is that
the positioning time is longer compared to the L profile, which is more efficient in terms of time.
S-ramp time for jerk limitation ( 642)
Without jerk limitation (L profile)
With jerk limitation (S profile)
Final speed (
)
This specifies the speed at which the drive is to start the next profile after reaching the target position.
With a final speed not equal to "0", "velocity changeover" or "overchange" is possible, i.e. when the
target position is reached, a second positioning process is started immediately without the drive coming
to a standstill at the first target position.
Target position
Final speed (in this case, not equal to "0")
Sequence profile (
for profile linkage/following block control
A special feature is automatic advancing to subsequent profiles with and without velocity changeover.
For this purpose, the profile number of the desired subsequent profile (1 to 15) is simply set in the
parameter "Sequence profile" (
) of a profile.
After execution of the profile (target position reached), the set following (subsequent) profile is started
automatically. In this way, profile chains can be stipulated without additional control processes.
• If the profile parameter "Final speed" (
) is set to <> "0", there is a velocity changeover
leading into the following (subsequent) profile at the set final speed.
• If "0" is set for the following (i.e. subsequent) profile, profile linkage does not take place.
• This function can be performed in all positioning modes.
TP profile (
)
Profile number of the profile (1 … 15) that is to be executed after a touch probe has been detected.
• If "0" is set, there will be no profile stepping through touch probe.
• Only relevant for positioning modes with touch-probe.
Touch probe positioning ( 641)
TP signal source (
)
Selection of the signal source for touch probe detection.
• Only relevant for positioning modes with touch-probe.
Touch probe positioning ( 641)
Icon
Profile parameter
E
a
v [unit/s]
t [s]
t [s]
F
v
pos
v
end
v [unit/s]
t [s]