Configuration example 1, 6encoder/feedback system – Lenze 8400 TopLine User Manual
Page 335
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
335
6
Encoder/feedback system
6.3
Multi-Encoder (X8)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
6.3.2.5
Configuration example 1: Absolute wire draw encoder "XKS09-HTBM0527" by SICK
Data
• Wire length: 5 m
• Hiperface resolution: 4096 digits x 4184 "revolutions"
• SinCos resolution: 128 increments (1 period ≡ 1.1953 mm 153 mm ≡ one "revolution")
• 1 [unit] = 1 mm
• Feed of the mechanics = 4 mm/revolution
Scaling of the position value
In order to scale the evaluation of the SinCos track, the traverse path in [units] has to be entered in
which is covered in order to pass through once the SinCos increment of the encoder
(
) (here 128 increments x 1.1953 mm period length = 153 mm).
The absolute Hiperface track is scaled by the setting of the "steps per revolution" in
. Here,
a revolution is equated to the path which corresponds to the SinCos number of increments of the
encoder (
).
Required settings
In "
", the feed constant and the gearbox factors for motors and position
encoders must be set as follows:
• The position encoder gearbox factor must be set to 1:1.
• When the motor gearbox factor is set to 1:1, the path covered at one motor revolution has to be
entered as feed constant in
in [units].
• In case of a different motor gearbox factor, the path covered at one defined "drive roll"
revolution has to be entered as feed constant in
in [units].
The feed of the mechanics entered in
(here: 4 mm) is displayed with 65536 increments.
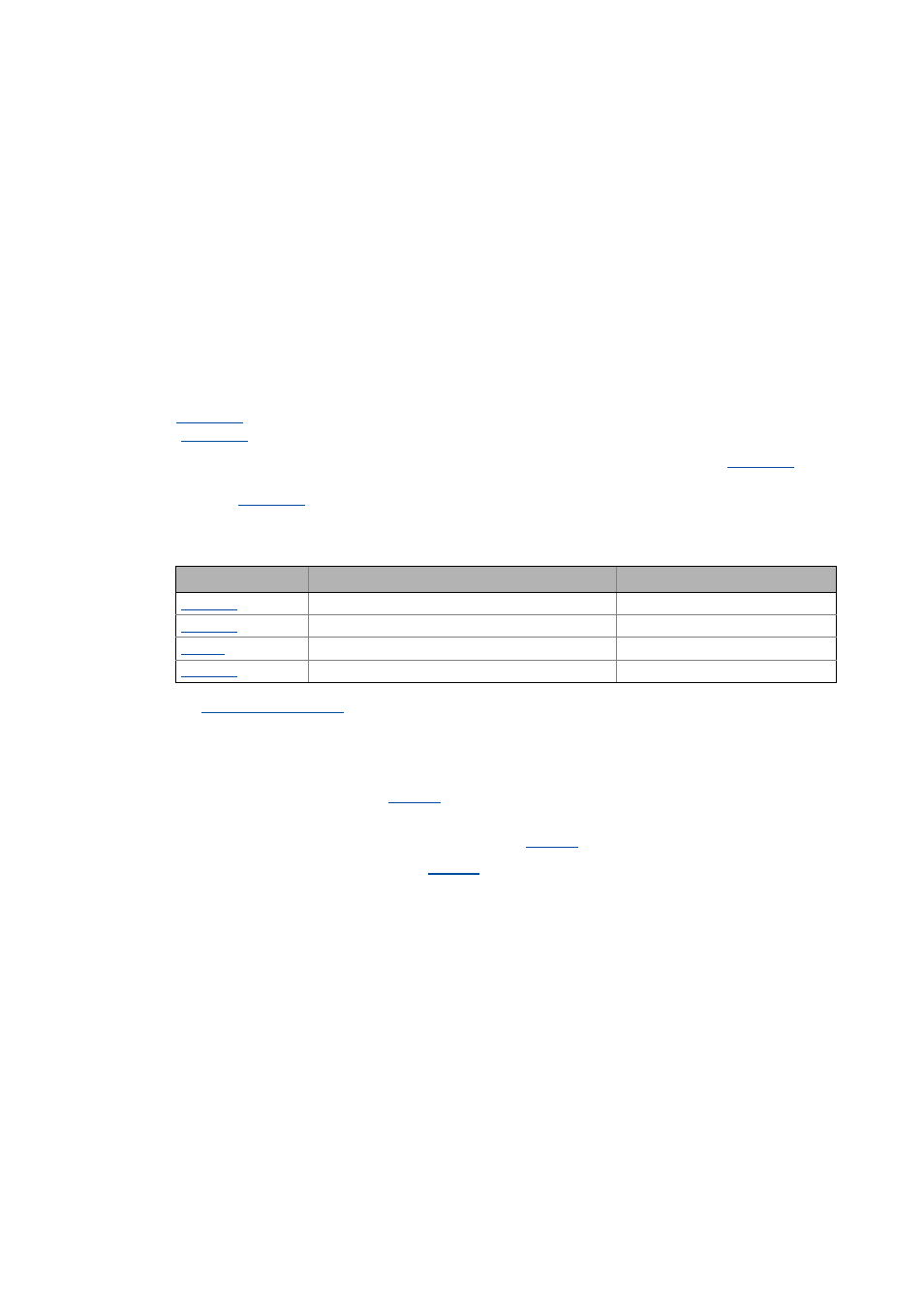
Parameter
Info
Setting for example
Hiperface: Number of revolutions
4184
Hiperface: Steps per revolution
4096
LS_MultiEncoder: Solid measure
1: linearly unipolar
LS_MultiEncoder: Traverse path - encoder increment
153