5motor control (mctrl) – Lenze 8400 TopLine User Manual
Page 309
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
309
5
Motor control (MCTRL)
5.14
Internal interfaces | System block "LS_MotorInterface"
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
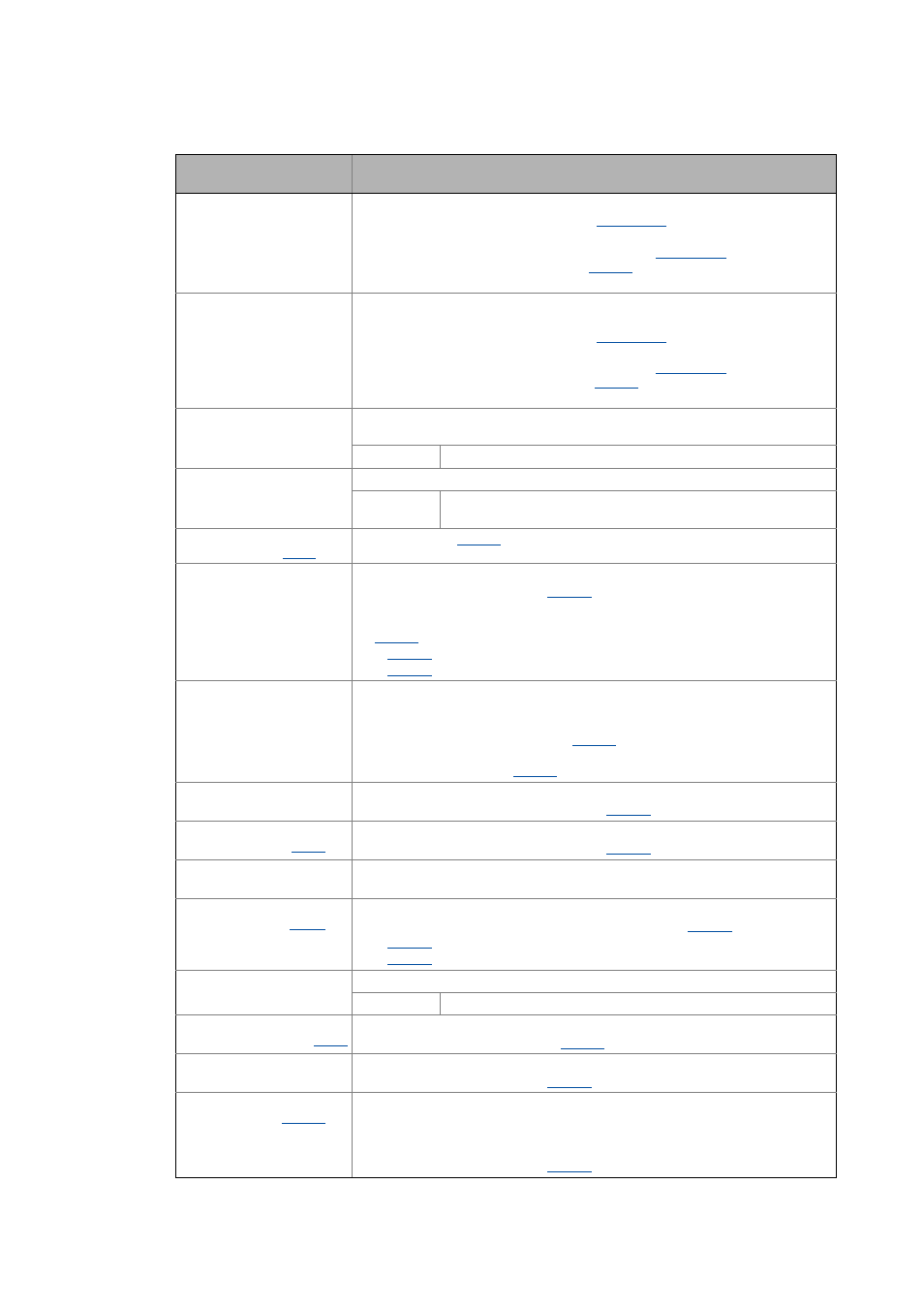
dnMotorPosAct_p
DINT
Current position in [increments]
• If the gearbox factor position encoder (
) is equal to "1", the motor
position is output.
• Otherwise, if the gearbox factor position encoder (
) is not equal to "1"
and a position encoder has been set in
, a position referring to the position
encoder is output.
dnMotorDeltaPosAct_p
DINT
Current following error in [increments]
• Following error = Difference between set position and actual position
• If the gearbox factor position encoder (
) is equal to "1", the motor
following error is output.
• Otherwise, if the gearbox factor position encoder (
) is not equal to "1"
and a position encoder has been set in
, a following error referring to the
position encoder is output.
bLimSpeedCtrlOut
BOOL
"Speed controller or manipulating variable of the slip regulator inside the limitation"
status signal
TRUE The speed controller output is internally limited
bLimSpeedSetVal
BOOL
"Reduction or increase of the setpoint speed active" status signal
TRUE Reduction or increase of the setpoint speed by the I
max
controller is
active
wMaxMotorSpeed
| BOOL
Reference speed (
)
nOutputSpeedCtrl_a
INT
Speed controller output
• Scaling: 16384 ≡ 100 % M
max
• In case of the "VFC (+encoder)" motor control, this output is the output of the slip
regulator. In this case, the scaling depends on the reference frequency (display in
•
< 650 Hz: 16384 ≡ 327.68 Hz (24000 ≡ 480.00 Hz)
•
> 650 Hz: 16384 ≡ 655.36 Hz (12000 ≡ 480.00 Hz)
nSpeedCtrlIAct_a
INT
Current value of speed controller integrator
• Scaling depends on the selected motor control:
• V/f control (VFCplus + encoder):
16384 ≡ 100 % reference speed (
• Servo control (SC) or vector control (SLVC):
16384 ≡ 100 % M
max
(
)
nEffSpeedSetValue_a
INT
Effective speed setpoint
• Scaling: 16384 ≡ 100 % reference speed (
nMotorSpeedAct_a
| INT
Actual speed value
• Scaling: 16384 ≡ 100 % reference speed (
nMotorSpeedAct_v
INT
Actual speed value
• Scaling: 65535 ≡ 1 revolution
nMotorFreqAct_a
| INT
Current field frequency
• Scaling depends on the reference frequency (display in
•
< 650 Hz: 16384 ≡ 327.68 Hz (24000 ≡ 480.00 Hz)
•
> 650 Hz: 16384 ≡ 655.36 Hz (12000 ≡ 480.00 Hz)
bLimTorqueSetVal
BOOL
"Setpoint torque inside the limitation" status signal
TRUE The setpoint torque is internally limited
wMaxMotorTorque
Maximum motor torque
• wMaxMotorTorque = 10 * M
max
(
)
nInputTorqueCtrl_a
INT
Input value of the torque control (torque setpoint)
• Scaling: 16384 ≡ 100 % M
max
nMotorTorqueAct_a
| INT
Actual torque
• In the "VFC (+encoder)" motor control mode, this value is determined from the
current motor current and only approximately corresponds to the actual torque
value..
• Scaling: 16384 ≡ 100 % M
max
Identifier
DIS code | data type
Value/meaning