Configuration example 2, Distance sensor "dme5000-111" by sick, 6encoder/feedback system – Lenze 8400 TopLine User Manual
Page 343
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
343
6
Encoder/feedback system
6.3
Multi-Encoder (X8)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
6.3.3.4
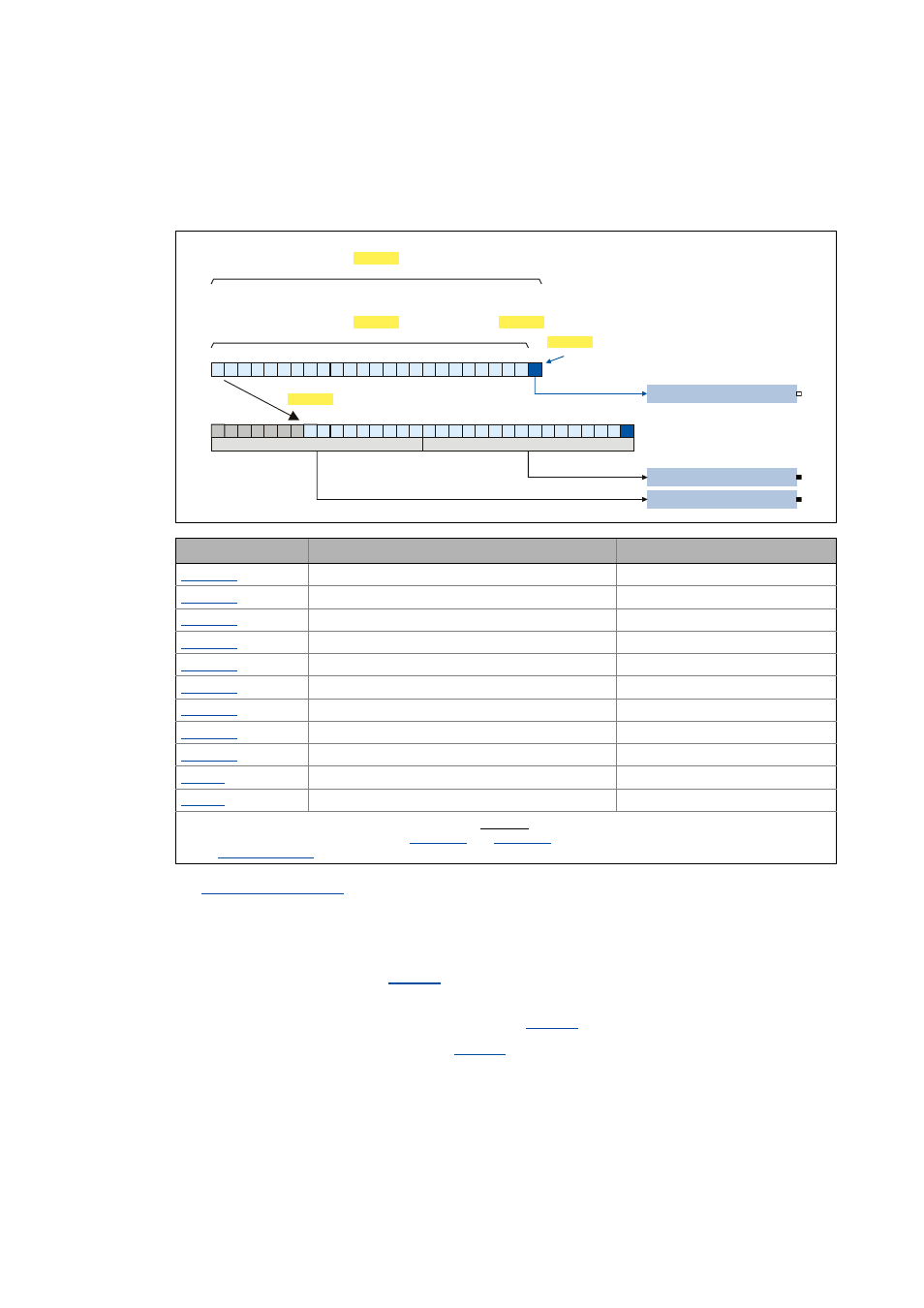
Configuration example 2: Distance sensor "DME5000-111" by SICK
Coding: Gray code with 25 bits of data word length
(Bit 0 = status bit in binary format, bit 1 ...24 = position, resolution 1 bit = 0.1 mm)
In "
", the feed constant and the gearbox factors for motors and position
encoders must be set as follows:
• The position encoder gearbox factor must be set to 1:1.
• When the motor gearbox factor is set to 1:1, the path covered at one motor revolution has to be
entered as feed constant in
in [units].
• In case of a different motor gearbox factor, the path covered at one defined "drive roll"
revolution has to be entered as feed constant in
in [units].
• The feed of the mechanics entered in
is displayed with 65536 increments.
Parameter
Info
Setting for example 2
SSI encoder: Data word length
25
SSI encoder: Bits SingleTurn
24
SSI encoder: Start bit Singleturn
1
SSI encoder: Bits Multiturn
0
SSI encoder: Start bit Multiturn
0
SSI encoder: Status bit 1
0
SSI encoder: Shift of raw value
7
SSI encoder: Status bit 2
0 (32)*
SSI encoder: Status bit 3
0 (32)*
SSI encoder: Coding
2: Position Gray
LS_MultiEncoder: Solid measure
1: linearly unipolar
* As the encoder data word in this example contains only one status bit, the evaluation can be deactivated
completely by entering the value "32" in
and
. Thus, the status bit outputs bState2 and bState3
of the
always have the value "0".
/6B0XOWL(QFRGHUZ/RZ:RUG
&
/6B0XOWL(QFRGHUZ+LJK:RUG
&
&
6LQJOHWXUQ
/6B0XOWL(QFRGHUE6WDWH
&
%LWV
6LQJOHWXUQ
6WDUWELW
6LQJOHWXUQ
'DWDZRUGOHQJWK
6WDWXVELW
6KLIWRIUDZYDOXH
+LJK:RUG
/RZ:RUG
&