Internal interfaces | application block "la_tabpos, 8technology applications – Lenze 8400 TopLine User Manual
Page 494
8
Technology applications
8.4
TA "Table positioning"
494
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
8.4.2
Internal interfaces | application block "LA_TabPos"
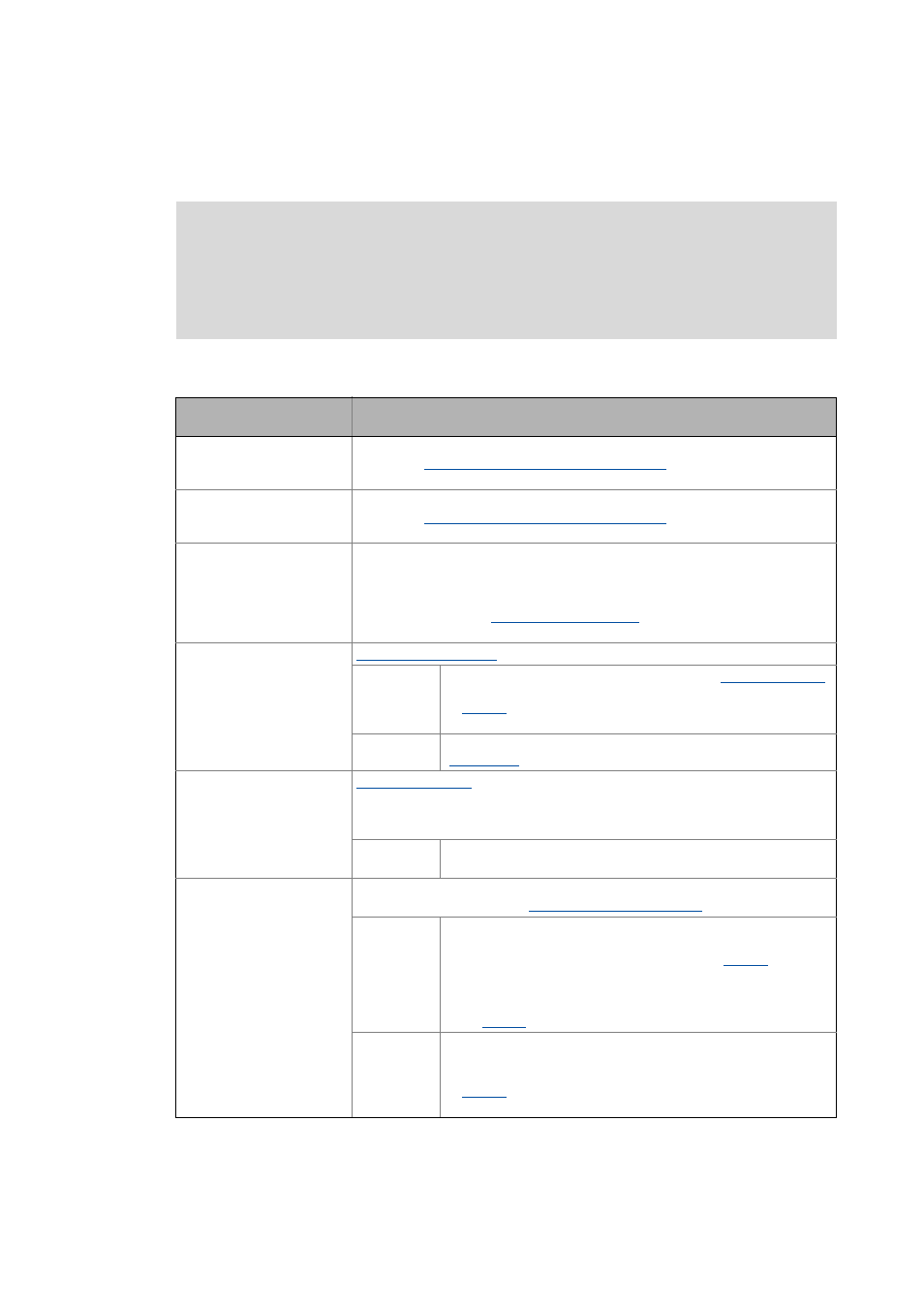
Inputs
Note!
The connectors grayed out in the following table are hidden in the function block editor
in the Lenze setting.
• These connections can be shown via the Connector visibilities command in the
Context menu of the application block.
Identifier
Data type
Information/possible settings
wCANDriveControl
WORD
Control word via system bus (CAN) for device control
• See the "
wCANControl/wMCIControl control words
on device control for a detailed description of the individual control bits.
wMCIDriveControl
WORD
Control word via communication module (e.g. PROFIBUS) for device control
• See the "
wCANControl/wMCIControl control words
on device control for a detailed description of the individual control bits.
wSMControl
WORD
Interface to the optional safety system.
• Setting control bit 0 ("SafeStop1") in this control word causes e.g. the automatic
deceleration of the drive to standstill within this application (in the Motion
Control Kernel).
• See the subchapter "
" of the chapter on basic drive
functions for a detailed description of the individual control bits.
bCInh
BOOL
FALSE Enable controller: The controller switches to the "
device status if no other source for controller inhibit is active.
•
provides a bit coded representation of all active
sources/triggers of a controller inhibit.
TRUE Inhibit controller (controller inhibit): The controller switches to the
" device status.
bFailReset
BOOL
In the Lenze setting this input is connected to the digital input controller enable so
that a possibly existing error message is reset together with the controller enable (if
the cause for the fault is eliminated).
TRUE The current fault is reset, if the cause for the fault is eliminated.
• If the fault still exists, the error status remains unchanged.
bSetQuickstop
BOOL
Enable quick stop (QSP)
• Also see device command "
Activate/deactivate quick stop
".
TRUE Activate quick stop
• Motor control is decoupled from the setpoint selection and,
within the deceleration time parameterised in
, the motor
is brought to a standstill (n
act
= 0).
• The motor is kept at a standstill during closed-loop operation.
• A pulse inhibit is set if the auto-DCB function has been activated
via
.
FALSE Deactivate quick stop
• The quick stop is deactivated if no other source for the quick stop
is active.
•
displays a bit code of active sources/causes for the quick
stop.