6encoder/feedback system – Lenze 8400 TopLine User Manual
Page 365
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
365
6
Encoder/feedback system
6.5
Pole position identification (PPI)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
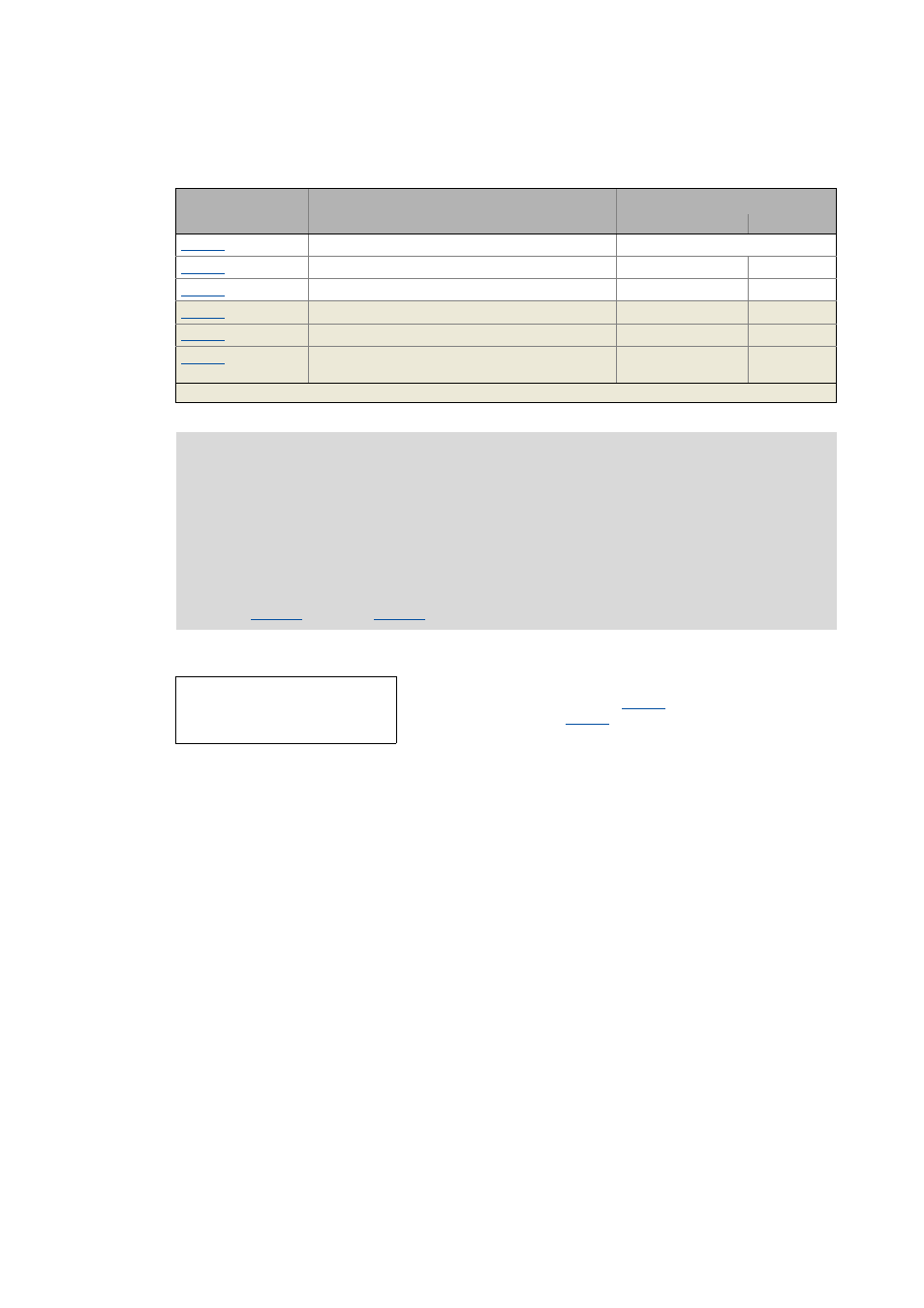
Short overview of the relevant parameters:
• The stator time constants can be calculated based on the following formula:
Parameter
Info
Lenze setting
Value Unit
PLI without motion
0x1 (bit coded)
PLI without motion: Adaptation of time duration
0
PLI without motion: Adaptation of ident angle
0 °
PLI without motion: Optimisation factor
- %
PLI without motion: Running time
- ms
PPI without motion: Identified rotor displacement
angle
- °
Highlighted in grey = display parameter
Note!
In case of synchronous motors with a stator time constant < 1 ms, the pole position
identification is not executed since the resulting test current pulse could exceed the
permissible motor current.
• This, however, only affects very few synchronous motors with very low power (e.g.
Lenze motor MDSKS-020-13-300 with rated power of 40 W).
• A non-executed pole position identification can be recognised by the display
= 0 % and
= 0 ms.
T
S
= stator time constant
L
ss
= Motor stator leakage inductance (
)
R
s
= Motor stator resistance (
)
T
s
[ms]
L
ss
[mH]
R
s
Ω
[ ]
--------------------
=