5 remedies for undesired drive behaviour, Remedies for undesired drive behaviour, 5motor control (mctrl) – Lenze 8400 TopLine User Manual
Page 208
5
Motor control (MCTRL)
5.7
Sensorless vector control (SLVC)
208
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.7.5
Remedies for undesired drive behaviour
Drive behaviour
Remedy
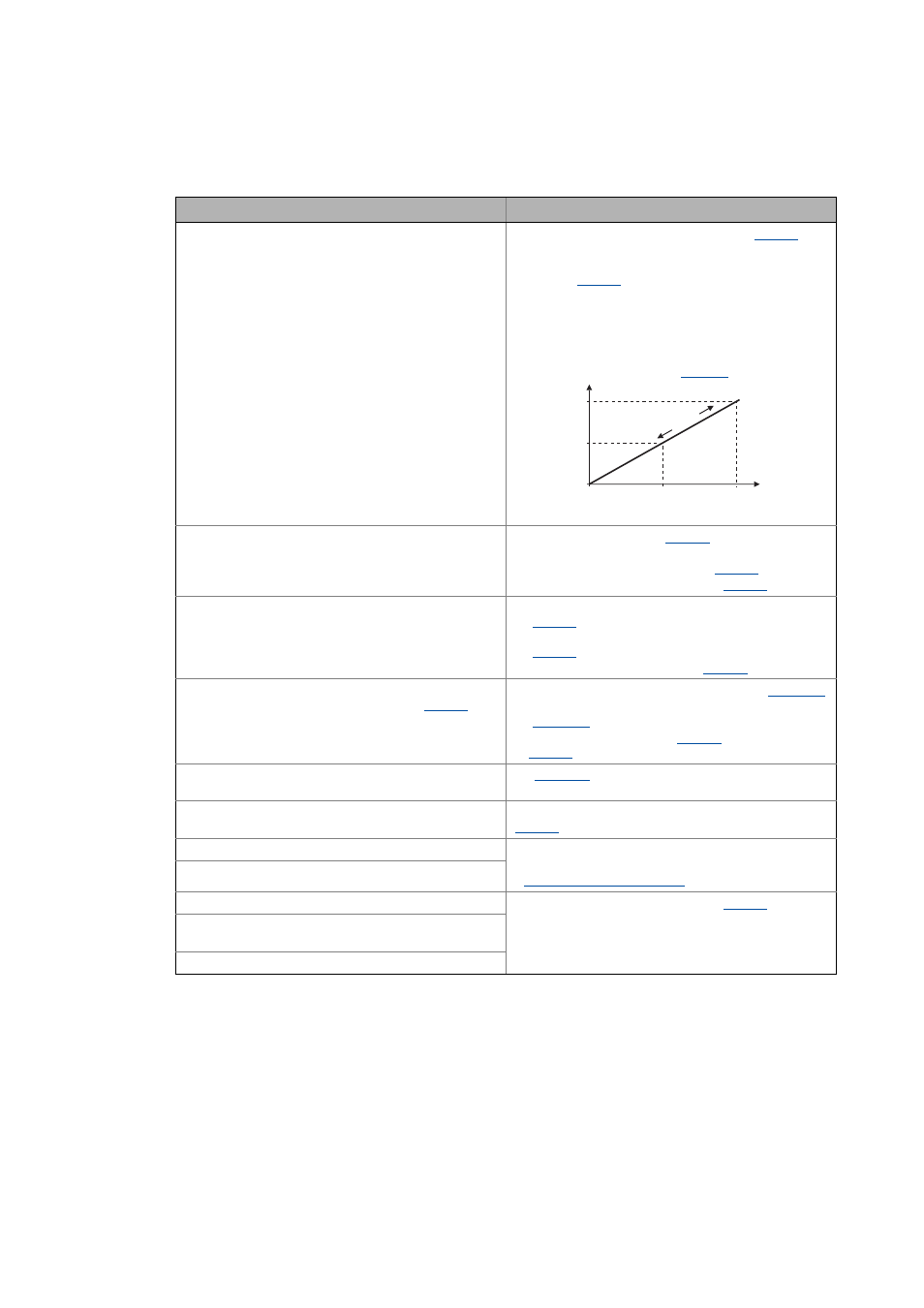
Deviation between no-load current and magnetising
current or bad speed or torque accuracy.
Adapt the motor magnetising inductance (
) for
no-load operation.
• If the no-load current is greater than the magnetising
current (
) at 0.5-fold rated motor speed, the
magnetising inductance must be reduced until the
no-load current and the magnetising current have the
same values.
• Otherwise, the magnetising inductance must be
increased.
Tendency of the correction of
PN: Rated motor power
Insufficient speed constancy at high load: Setpoint and
motor speed are not proportional anymore.
Caution: Overcompensation of the settings mentioned
under " Remedy" may result in unstable behaviour!
Via the slip compensation (
), the speed stability
under high loads can be affected:
• If n
act
> n
slip
, reduce the value in
• If n
act
< n
slip
, increase the value in
Unstable control with higher speeds.
• Check the setting of the magnetising inductance
(
) by comparing the current consumption in
no-load operation with the rated magnetising current
(
).
• Optimise oscillation damping (
"Short circuit" (oC1) or "Clamp operation active" (oC11)
error messages at short acceleration time (
) in
proportion to the load (controller cannot follow the
dynamic processes).
• Increase the gain of the torque controller (
• Reduce the reset time of the torque controller
(
• Increase the acceleration (
)/deceleration (
) time.
Mechanical resonance at certain speeds.
function block masks out those speed
ranges that include resonance.
Speed variations in no-load operation for speeds > 1/3
rated speed.
Minimise speed oscillations with oscillation damping
(
).
Drive runs unstable.
Check set motor data (nameplate data and equivalent
circuit diagram data).
Motor selection/Motor data ( 135)
Setpoint speed and actual speed differ strongly.
The torque required is not generated at standstill.
Increase motor magnetising current (
).
Current overshoots occur when heavy loads are
accelerated from standstill (OC1 or OC11 error).
The machine runs uneven.
0,37
22
90
C0092
-15 %
+15 %
0
P [kW]
N