5motor control (mctrl) – Lenze 8400 TopLine User Manual
Page 308
5
Motor control (MCTRL)
5.14
Internal interfaces | System block "LS_MotorInterface"
308
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
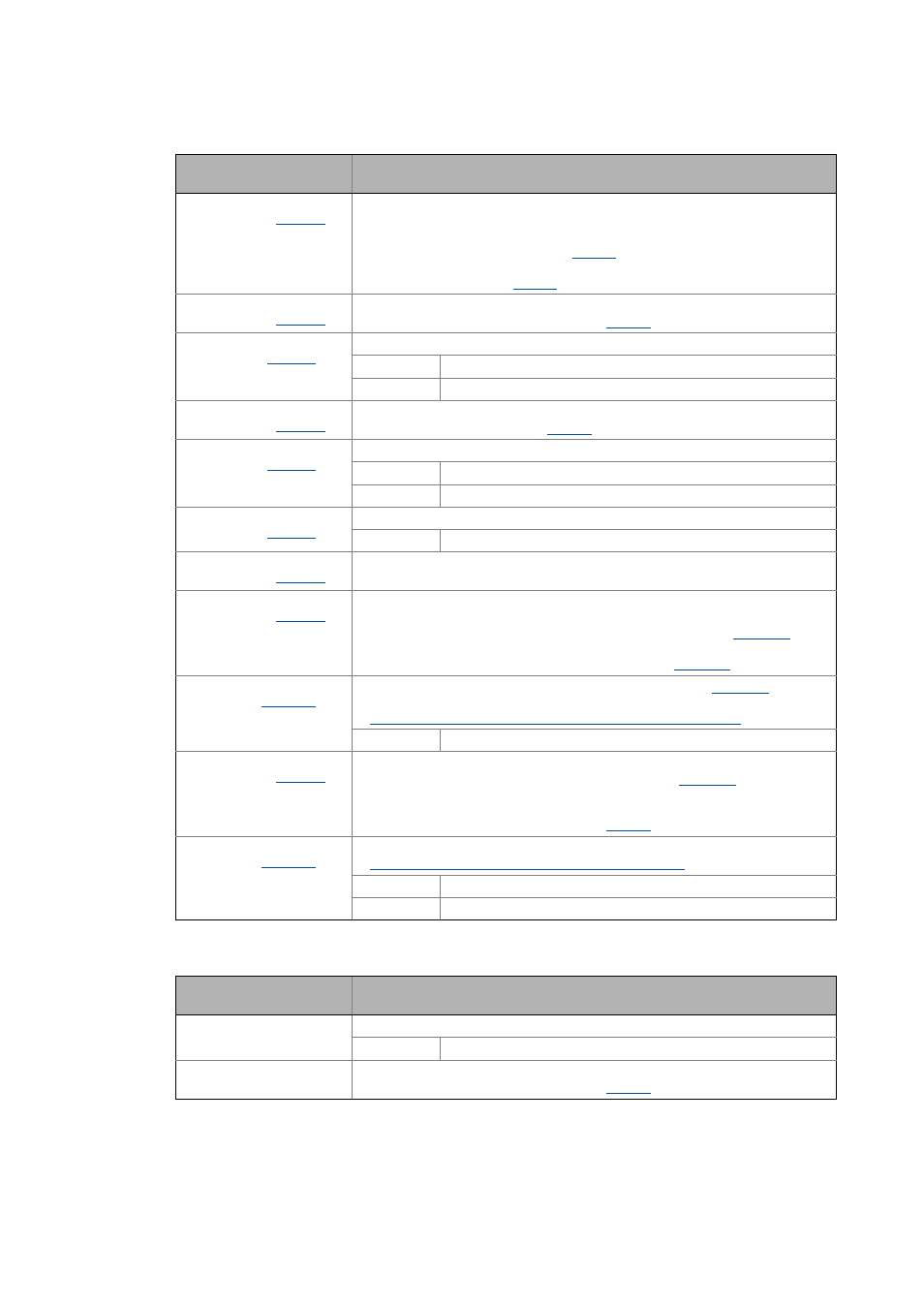
Outputs
nSpeedCtrlI_a
| INT
Value of the speed controller integrator
• Scaling depends on the selected motor control:
• V/f control (VFCplus + encoder):
16384 ≡ 100 % reference speed (
• Servo control (SC) or vector control (SLVC):
16384 ≡ 100 % M
max
(
)
nSpeedSetValue_a
| INT
Speed setpoint
• Scaling: 16384 ≡ 100 % reference speed (
bTorquemodeOn
| BOOL
Selection: Speed/Torque control
FALSE Speed control with torque limitation
TRUE Torque control with speed limitation
nTorqueSetValue_a
| INT
Torque setpoint / additive torque
• Scaling: 16384 ≡ 100 % M
max
bDcBrakeOn
| BOOL
Activate DC injection brake
FALSE Deactivate DC-injection braking
TRUE Activate DC-injection braking
bTorqueLimitAdaptOn
| BOOL
Adaptation of torque limitation
TRUE Activate adaptation of torque limitation.
nTorqueLimitAdapt_a
| INT
Value for adaptation of torque limitation
• Scaling: 16384 ≡ 100 % nTorqueMotLimit_a and nTorqueGenLimit_a
nInertiaAdapt_a
| INT
(from version 12.00.00)
Adaptation of the moment of inertia
• This process signal can be used during the process to dynamically control the
percentage of the variable moment of inertia (e.g. a reel) set in
which
is to be considered for setpoint feedforward control.
• Scaling: 16384 ≡ 100 % moment of inertia - process (
)
bBrakeChopperOn
| BOOL
(from version 12.00.00)
Switch on the internal brake chopper as "brake chopper slave" (
= "1: Yes")
when the controller is configured
Control of multiple internal brake choppers in the DC-bus system ( 289)
TRUE Switch on internal brake chopper.
nSpeedSetValueInertia_a
| INT
(from version 12.00.00)
Input for differential setpoint feedforward control (torque feedforward control)
• If the selection "1: nSpeedSetValueInertia_a" is set in
, this process
signal can be used to preselect any input value (e.g. setpoint of the position or
process controller) for torque feedforward control.
• Scaling: 16384 ≡ 100 % reference speed (
bVfcEcoDisable
| BOOL
(from version 13.00.00)
Deactivate energy optimisation for VFCplusEco
Improving the behaviour at high dynamic load changes
FALSE Activate energy optimisation.
TRUE Deactivate energy optimisation.
Identifier
DIS code | data type
Value/meaning
bLimPosCtrlOut
BOOL
"Position controller output inside the limitation" status signal
TRUE The position controller output is internally limited
nOutputPosCtrl_a
INT
Position controller output
• Scaling: 16384 ≡ 100 % reference speed (
Identifier
DIS code | data type
Information/possible settings