Process data assignment for fieldbus communication, 8technology applications – Lenze 8400 TopLine User Manual
Page 513
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
513
8
Technology applications
8.4
TA "Table positioning"
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
8.4.4
Process data assignment for fieldbus communication
The fieldbus communication is connected (preconfigured) to the previously selected technology
application by selecting the corresponding control mode in
• "30:
" for the connection to the system bus (CAN)
• "40:
" for the connection to a plugged-on communication module (e.g. PROFIBUS)
The assignment of the process data words depends only on the application, not on the bus system
used:
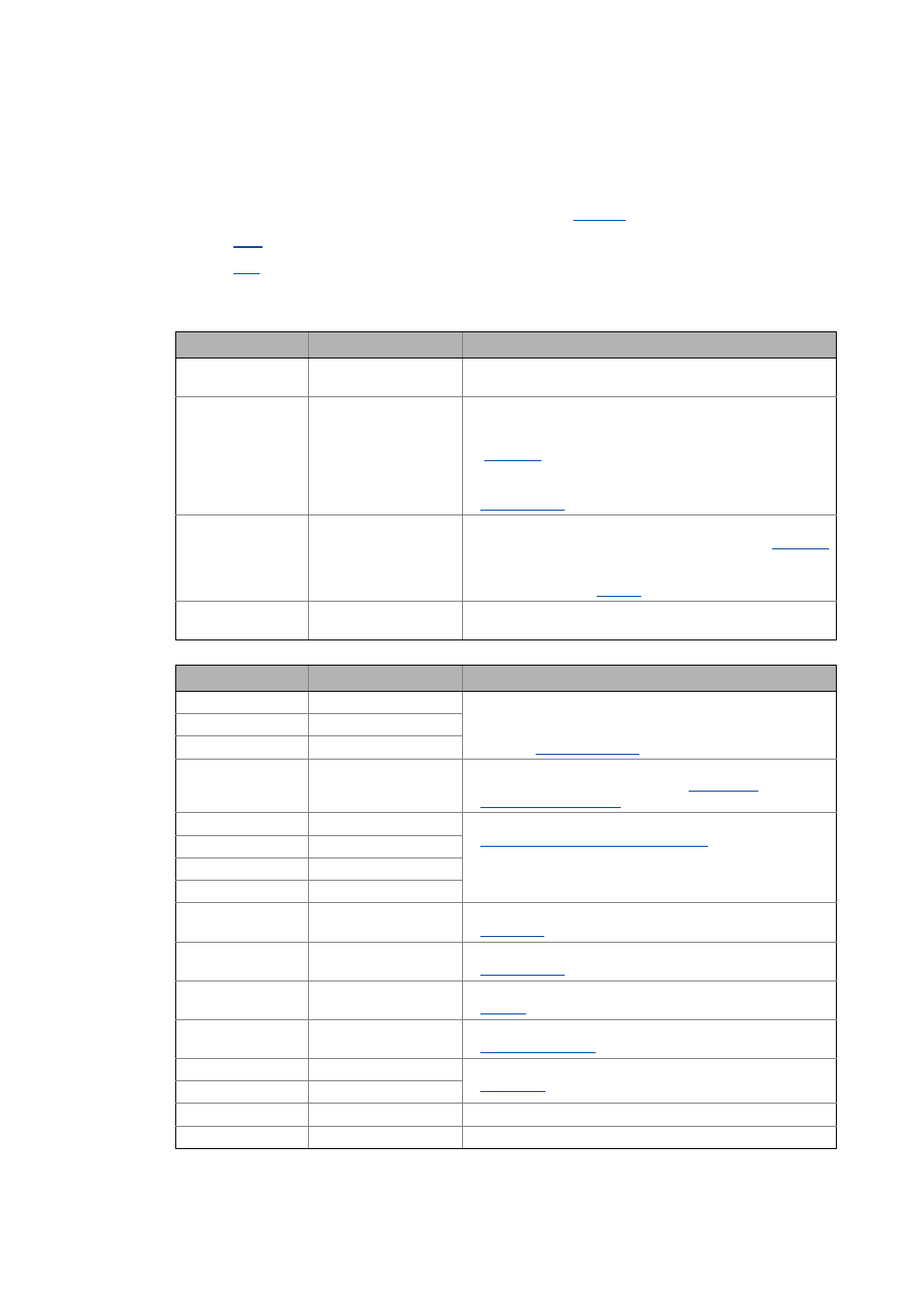
Input words
Name
Assignment
Word 1 DriveControl
Control word
• For bit assignment see the table below.
Word 2 SpeedOverride
Value for speed override
• Percentage multiplier for the currently active speed.
• 16384 ≡ 100 % of the maximum traversing speed (display in
).
• Values > 16384 are ignored.
• If the override value is 0 %, the drive is brought to a standstill.
Word 3 and 4 PosProfilePosition
Selection of the target position in [increments]
• The mode for calculating the position is selected in
• 65535 [Increments] ≡ 1 motor revolution
• The position resolution, i.e. how many increments form one
unit, is displayed in
Words 5 ... 16 -
Not preconfigured
• Only available in control mode "40: MCI".
Control word
Name
Function
Bit 0 MckOperationMode_1
Binary-coded selection of the operating mode of the Motion
Control Kernel
• For a detailed description of the individual control bits, see
chapter "
Bit 1 MckOperationMode_2
Bit 2 MckOperationMode_4
Bit 3 CINH
1 ≡ Inhibit drive controller (controller inhibit): The drive
controller changes to the device state "
Bit 4 PosProfileNo_1
Selection of the profile number
Stipulation of the profile to be executed ( 644)
Bit 5 PosProfileNo_2
Bit 6 PosProfileNo_4
Bit 7 PosProfileNo_8
Bit 8 PosExecute
1 ≡ Start travel job
Bit 9 EnableSpeedOverride
1 ≡ Activate speed override
Bit 10 HomeSetPosition
1 ≡ Set home position
Bit 11 FailReset
1 ≡ Reset error message
Bit 12 ManJogNeg
Manual jog in positive/negative direction
Bit 13 ManJogPos
Bit 14 -
Free control bit 14 (not assigned, freely assignable)
Bit 15 -
Free control bit 15 (not assigned, freely assignable)