5motor control (mctrl) – Lenze 8400 TopLine User Manual
Page 143
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
143
5
Motor control (MCTRL)
5.1
Motor selection/Motor data
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Automatic calculation of the field weakening controller parameters for ASM servo control
From version 15.00.00
, the field weakening controller parameters are automatically calculated as
well after a successful motor parameter identification. Moreover, the special functions of the
internal motor control listed in the table are activated.
• If these parameters are not to be calculated/activated, bit 6 has to be set to "1" in
Principal sequence of the motor parameter identification
1. The motor stator resistance (
) is measured.
2. The inverter error characteristic is measured.
3. The motor stator leakage inductance (
) is measured.
4. The V/f base frequency (
) is calculated.
5. The slip compensation (
) is calculated.
6. The V
min
) is detected.
7. Only for asynchronous motors:
The motor magnetising inductance (
) and the motor rotor resistance (
measured.
The motor magnetising current (
) is measured.
From version 12.00.00:
8. If
- bit 4 = "0" (Lenze setting):
The current controller and field controller parameters are calculated. (See
table
.)
9. If
- bit 5 = "1":
The speed controller parameters are calculated. (See
table
.)
10. If
- bit 6 = "1":
Other controller parameters are calculated. (See
From version 15.00.00:
11. If
- bit 6 = "0" (Lenze setting):
The field weakening controller parameters are calculated and certain special functions of the
internal motor control are activated. (See
table
.)
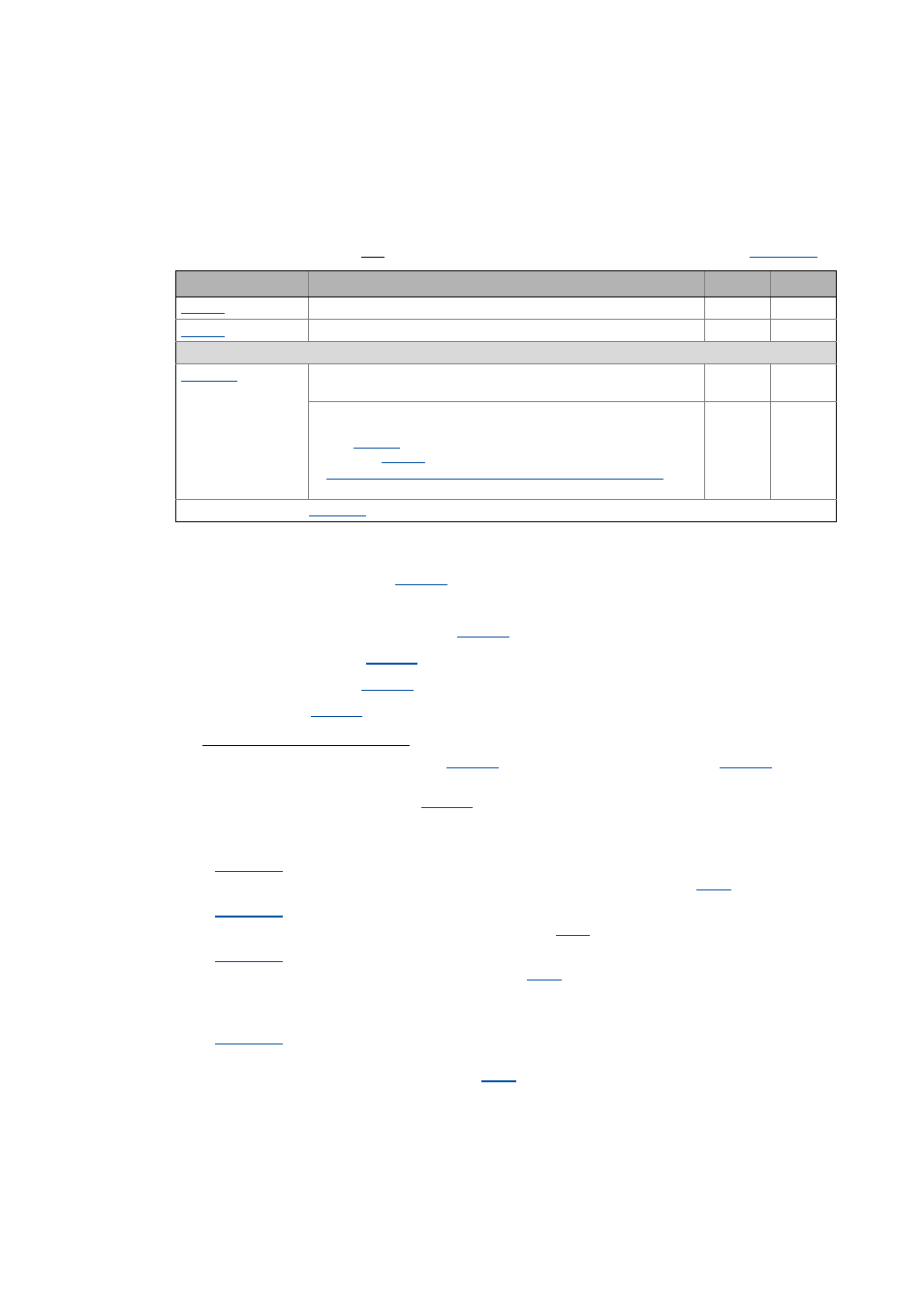
Parameter
Info
ASM
PSM
SC: Vp field weakening controller
SC: Tn field weakening controller
Activation of special functions of the internal motor control
Bit 5 is set to "1"
Field/field weakening controllers are called in a 500-μs cycle.*
Bit 7 is set to "1"
In case of servo control for asynchronous motors, the rated motor
speed (
C00087
) is assumed for the calculation of the slip from the
nameplate (
/bit 1 = "0".*
Slip calculation from motor equivalent circuit diagram data
* If bit 6 is set to "1" in
, bit 5 and bit 7 are reset to "0".