77 l_dfset_1, 77 l_dfset_1 8, L_dfset_1 – Lenze 8400 TopLine User Manual
Page 1498: 19 function library
19
Function library
19.1
Function blocks
1498
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
19.1.77
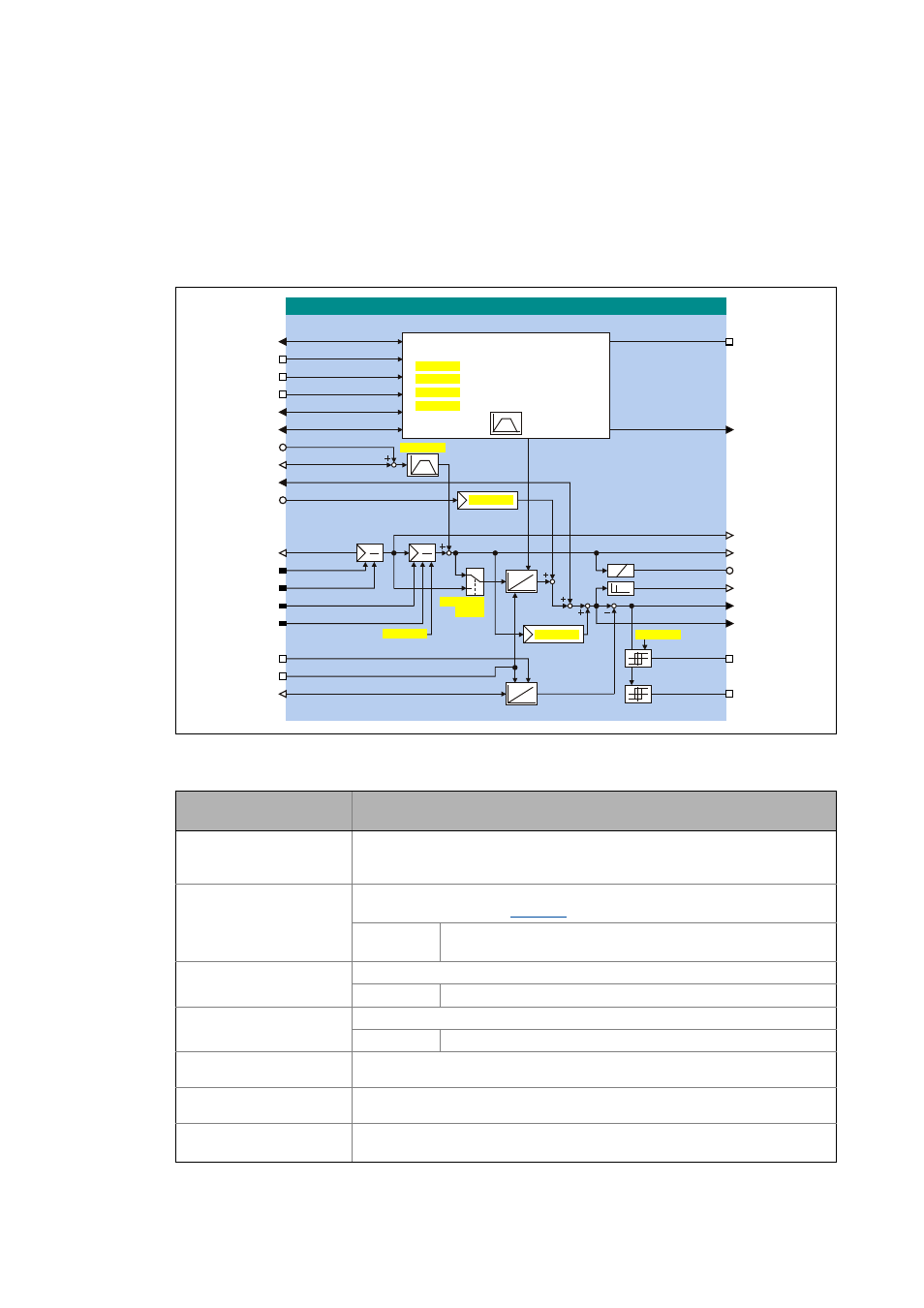
L_DFSET_1
This FB prepares the master value for a slave drive. This FB enables the controller to follow the
master drive true to speed and angle.
• You can select values for the stretch factor and gearbox factor of the slave.
• A speed trimming or angular trimming is possible.
Inputs
Identifier
Data type
Information/possible settings
dnDeltaPosIn_p
DINT
Input for considering a following error for the mark correction
• The value of this input is used for the following error compensation if the
nNAct_v input is not assigned.
bZeroPulse
BOOL
Enable of the zero pulse-/touch probe synchronisation for the modes 2, 10 ... 13
• The mode is selected in
.
FALSETRUE
TRUE
Synchronisation enabled.
bActTPReceived
BOOL
Input for detecting an actual value touch probe or zero pulse
FALSETRUE Actual value touch probe or zero pulse received.
bSetTPReceived
BOOL
Input for status signal "Touch probe detected"
FALSETRUE Touch probe or zero pulse received.
dnActTPPos_p
DINT
Input for accepting the position measured via touch probe at bActTPReceived
dnSetTPPos_p
DINT
Input for accepting the position measured via touch probe at bSetTPReceived
nSpeedTrim_a
INT
Speed trimming in [%]
• Scaling: 16384 ≡ 100 %
/B')6(7B
&
&
%LW
&
& 6\QFKURQLVDWLRQPRGH
E6HW735HFHLYHG
GQ6HW733RVBS
E$FN
E=HUR3XOVH
E$FW735HFHLYHG
GQ$FW733RVBS
Q6SHHG7ULPBD
Q6SHHG7ULPBY
Z*HDU1XP
Z*DLQ1XP
GQ3RV2IIVHWBS
Q6HWBY
Z*DLQ'HQRP
Z*HDU'HQRP
E5HVHW$OO,QWHJUDWRUV
E6HW$FW,QWHJUDWRU
Q3RVLWLRQLQJ7ULPPLQJ
Q1$FWBY
D
E
D
E
&
GQ'HOWD3RVBS
GQ3RV6HW2XWBS
Q6HW*HDU7ULPBD
E)ROORZLQJ(UU
E3RV2YHUIORZ
&
Q6HW*DLQBY
&75/
Q6HW*HDU7ULPBY
&
BYBD
&
Q6SHHG6HW2XWBY
& 5DPSDQJOHFRPSHQVDWLRQ
,QYHUWJHDUER[ &
5DPS
6SHHG7ULP
6SHHGGHSHQGHQW
DQJOHDGMXVWPHQW
0XOWLSOLHU
DQJXODUWULPPLQJ
'LYLGHUIRUVHWSRLQW]HURSXOVH
'LYLGHUIRUDFWXDOYDOXH]HURSXOVH
GQ3RV'LII2XWBS
GQ'HOWD3RV,QBS