Configuration example 1, 6encoder/feedback system – Lenze 8400 TopLine User Manual
Page 342
6
Encoder/feedback system
6.3
Multi-Encoder (X8)
342
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
6.3.3.3
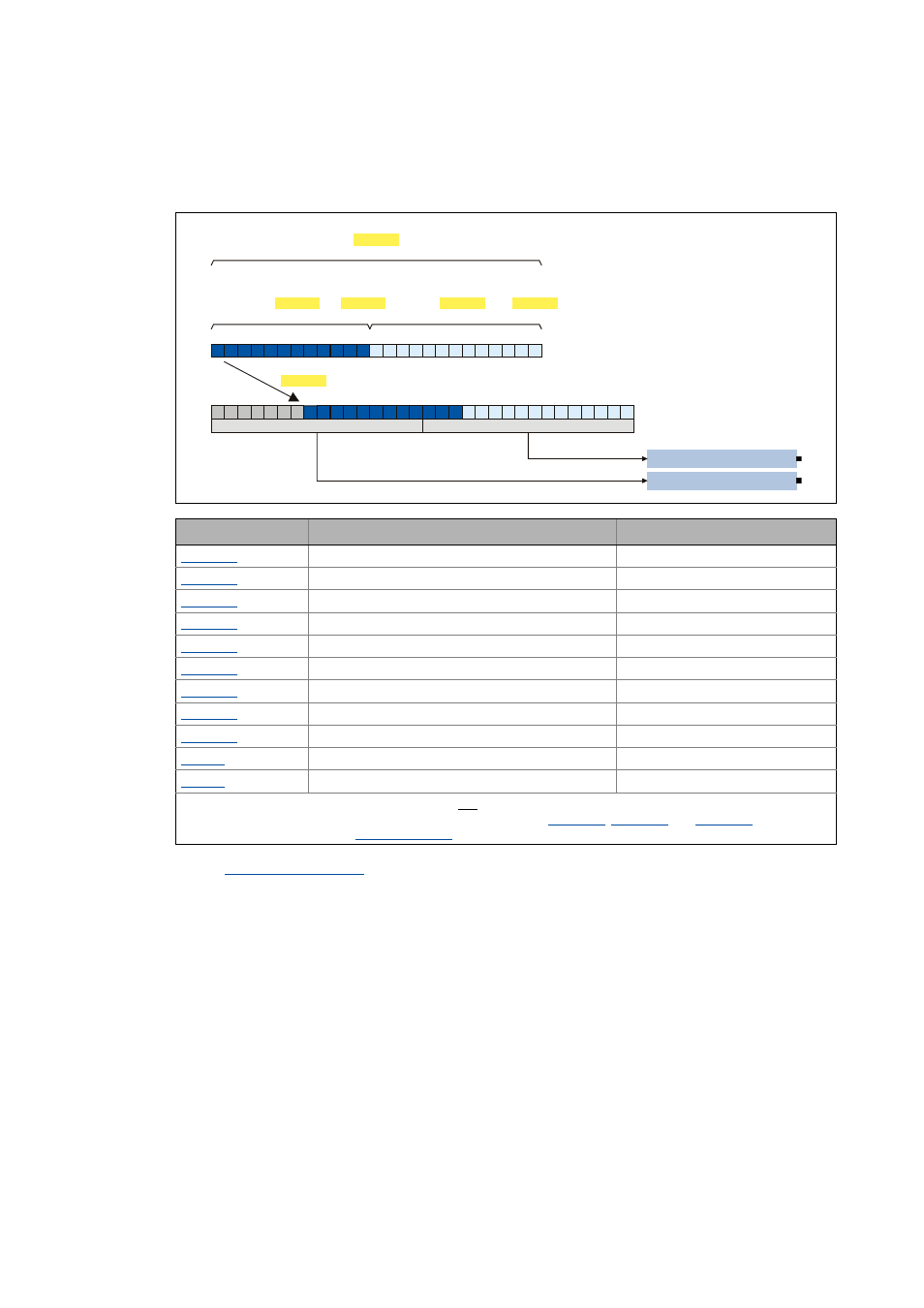
Configuration example 1: Optical multi-turn rotary encoder "G0M2H Z04" by Baumer
Coding: Gray code with 25 bit data word length (8192x4096)
• In "
", the feed constant and the gearbox factors for motor and position
encoder must be set correctly.
• One encoder revolution is displayed with 65536 increments.
Parameter
Info
Setting for example 1
SSI encoder: Data word length
25
SSI encoder: Bits SingleTurn
13
SSI encoder: Start bit Singleturn
0
SSI encoder: Bits Multiturn
12
SSI encoder: Start bit Multiturn
13
SSI encoder: Status bit 1
0 (32)*
SSI encoder: Shift of raw value
7
SSI encoder: Status bit 2
0 (32)*
SSI encoder: Status bit 3
0 (32)*
SSI encoder: Coding
1: Gray code
LS_MultiEncoder: Solid measure
0: rotatively unipolar
* As the encoder data word in this example does not contain any status bits, you the evaluation of the status bits
can also be deactivated completely by entering the value "32" in
and
. Thus, the
three status bit outputs of the
always have the value "0".
/6B0XOWL(QFRGHUZ/RZ:RUG
&
/6B0XOWL(QFRGHUZ+LJK:RUG
&
&
&
&
6LQJOHWXUQ
0XOWLWXUQ
&
%LWV
6LQJOHWXUQ
6WDUWELW
6LQJOHWXUQ
%LWV
0XOWLWXUQ
6WDUWELW
0XOWLWXUQ
'DWDZRUGOHQJWK
6KLIWRIUDZYDOXH
+LJK:RUG
/RZ:RUG