9basic drive functions (mck) – Lenze 8400 TopLine User Manual
Page 600
9
Basic drive functions (MCK)
9.4
Basic settings
600
Lenze · 8400 TopLine · Reference manual · DMS 6.0 EN · 06/2014 · TD05/TD14
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Parameterising the "setpoint holdback" function
For compensating the runtimes described before, a setpoint holdback can be parameterised in
. The function directly affects the setpoint forwarding from the Motion Control Kernel to the
motor control.
• Internally, the setpoints are transmitted with a delay by the time set in
from the
system block to the motor control.
• Setting rule:
= bus cycle time + 1 ms
• The Lenze setting "0 ms" corresponds to the previous behaviour (no setpoint holdback).
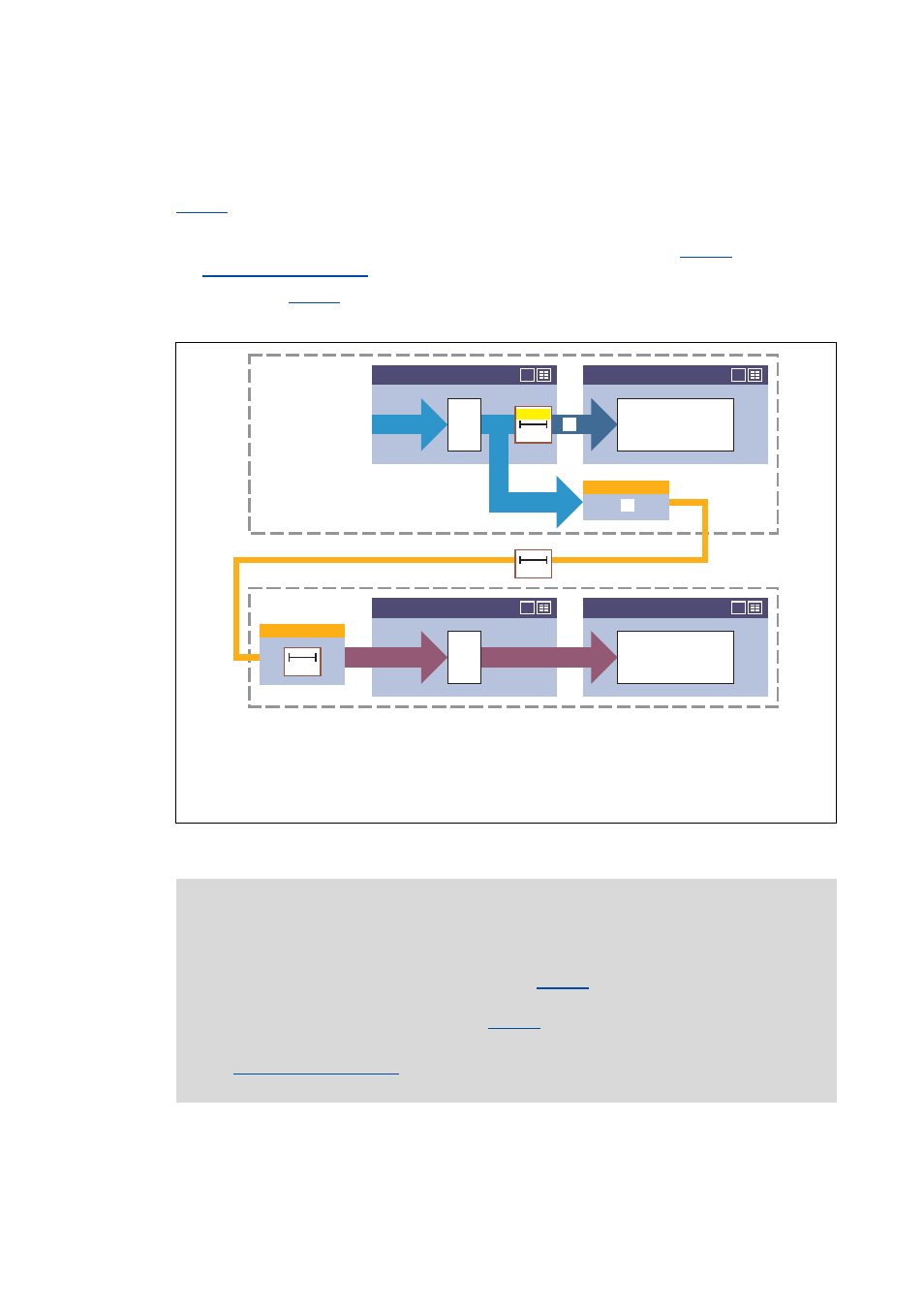
[9-20] Principle of the setpoint holdback (here only in the master for "setpoint line" topology)
Setpoints
Transfer of the setpoints to the motor control
Transfer of the setpoints to the slave drives via fieldbus
Setpoint holdback: Parameterisable runtime for the transfer of the setpoints to the motor control
Runtime on the bus due to the bus cycle time and telegram runtimes
Runtime in the slave controller due to the internal cycle time (1 ms) of the controller
LS_MotionControlKernel
?
LS_MotorInterface
?
Motor
interface
0
MCK
C01239
1
LP_CanOut
2
LS_MotionControlKernel
?
LS_MotorInterface
?
Motor
interface
MCK
LP_CanIn
Master
Slave
Field bus
Note!
In which drives the function is to be parameterised, depends on the bus topology:
• Setpoint line (1 master, many slaves):
Only in the master, the setpoint holdback (
) has to be set.
• Setpoint cascade (setpoints from one to drive to the other):
In all drives, the setpoint holdback (
) has to be set.
As the setpoint holdback is implemented in the Motion Control Kernel, the
system block is required for this function independent of the
setpoint source.