L_wndidentminertia, 5function blocks – Lenze E94A User Manual
Page 644
5
Function blocks
5.208
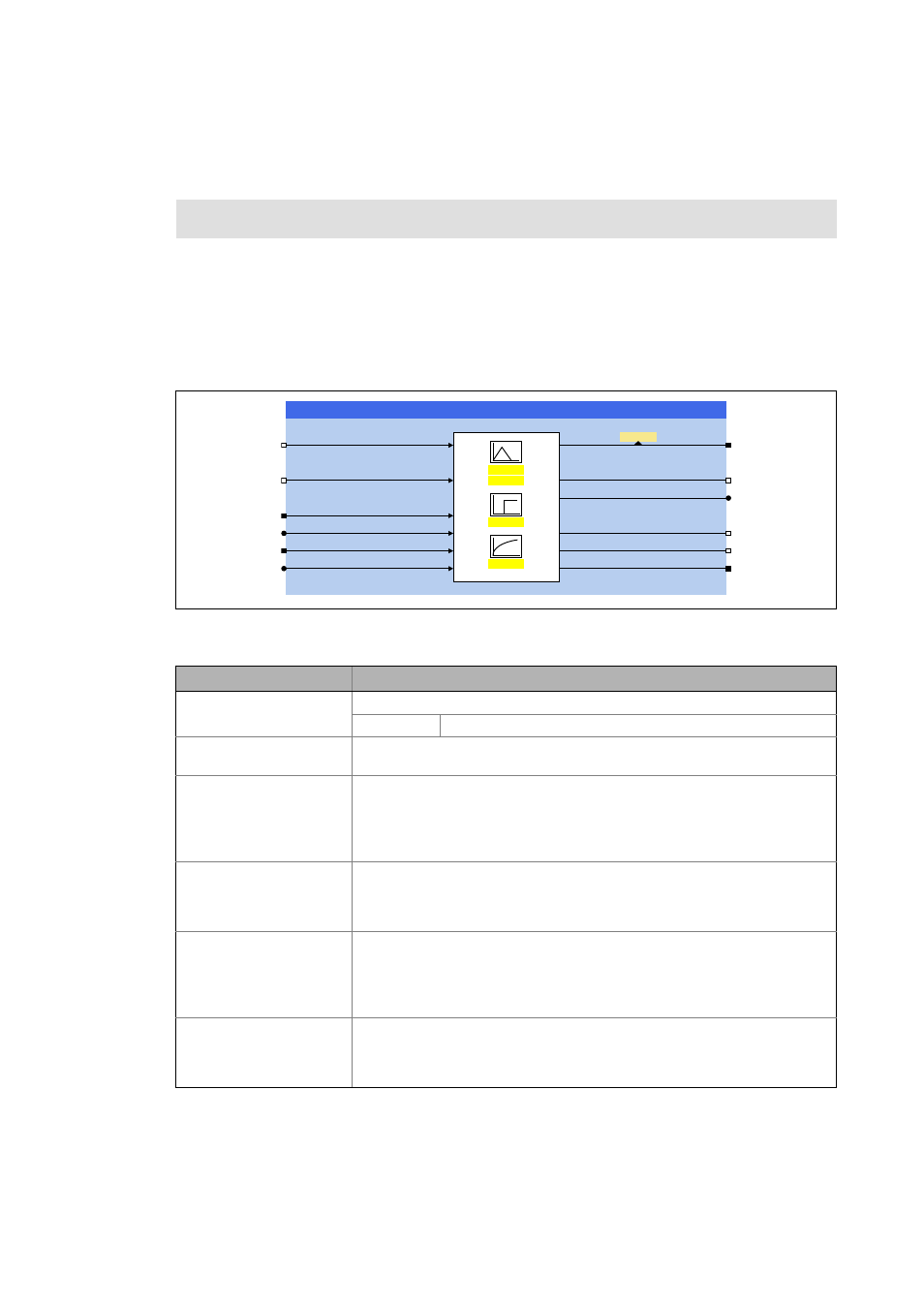
L_WndIdentMInertia - identification of the moment of inertia
644
Lenze · 9400 function library · Reference manual · DMS 6.7 EN · 08/2014 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.208
L_WndIdentMInertia - identification of the moment of inertia
By means of this FB, the current moment of inertia can be identified automatically. The FB takes over
the drive control on request and carries out the identification.
• Via dnState the current status of the identification run is displayed, or the cause that may have
lead to an early abort is shown.
• After the identification run has been completed successfully, the moment of inertia is output
via dwMInertia.
Inputs
Function library:
LenzeWinder
Runtime software licence:
Motion Control HighLevel
Motion Control TopLevel
Identifier/data type
Information/possible settings
bStartIdent
BOOL
Start identification of the moment of inertia
TRUE Start identification.
bFollowerEnabled
BOOL
Interface for the basic function "Torque follower"
• Connect this input with the output TF_bEnabled of the SB LS_TorqueFollower.
dwReferenceSpeed
DWORD
Motor reference speed in [rpm]
• 15000 rpm ≡ 2
26
≡ 67108864
• Internal limitation to 50000 rpm
• Connect this input to the output MI_dwReferenceSpeed of the
SB LS_MotorInterface.
dnActualMotorSpeed_n
DINT
Current speed of the motor shaft in [%]
• 100 % ≡ motor reference speed (dwReferenceSpeed)
• Connect this input to the output MI_dnActualMotorSpeed_n of the
SB LS_MotorInterface.
dwReferenceTorque
DWORD
Motor reference torque in [mNm]
• 1000 mNm ≡ 1 Nm
• Internal limitation to 3000 Nm.
• Connect this input to the output MI_dwReferenceTorque of the
SB LS_MotorInterface.
dnActualMotorTorque_n
DINT
Current actual torque of the motor in [%]
• 100 % ≡ motor reference torque (dwReferenceTorque)
• Connect this input to the output MI_dnActualMotorTorque_n of the
SB LS_MotorInterface.
E)ROORZHU(QDEOHG
E6WDUW,GHQW
GZ5HIHUHQFH7RUTXH
GQ6WDWH
E'RQH
E(QDEOH)ROORZHU
GQ7RUTXH6HWBQ
E%XV\
GQ$FWXDO0RWRU6SHHGBQ
GZ5HIHUHQFH6SHHG
GQ$FWXDO0RWRU7RUTXHBQ
GZ0,QHUWLD
&
&
&
&
/B:QG,GHQW0,QHUWLD
&