1 function, 5function blocks – Lenze E94A User Manual
Page 321
Lenze · 9400 function library · Reference manual · DMS 6.7 EN · 08/2014 · TD05
321
5
Function blocks
5.88
L_LdExtrapolate - extrapolation
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.88.1
Function
Compensation of bus transmission cycles > Sampling rate
If position information (e.g. the vertical shaft position) is exchanged between master and slave
drives via a bus system with a transmission cycle higher than the sampling rate or between tasks
with different cycle times, the setpoints cannot be processed in the control cycle of the drives. As a
result, the position does not change linearly but stepwise at constant speed, which causes torque
impulses.
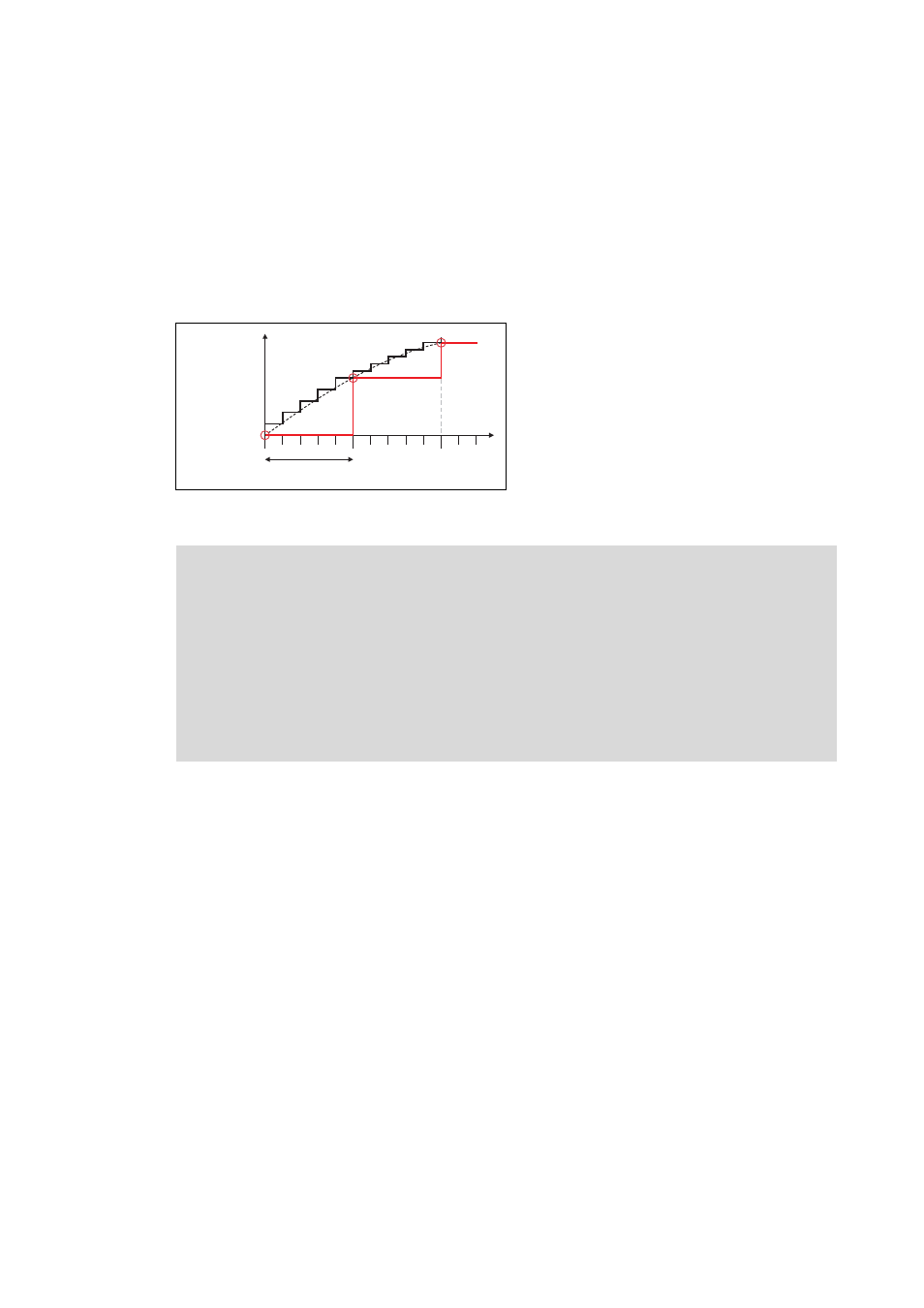
[5-46] Example: Signal characteristic with five extrapolation cycles
• By setting bEnable to TRUE, the extrapolation is activated.
• If bEnable is set to FALSE, the input signal is only looped through or the difference for speed out-
put is created.
Smoothing of a low-resolution absolute value encoder
If the resolution of the absolute value encoder is so low that a new setpoint is not available for every
new task call, this FB serves to "fine-interpolate" between the setpoints for a better smooth running.
• For this purpose enter instead of the bus cycle time the resolution converted at minimum speed
into the formula mentioned above for calculating the extrapolation cycles.
Forced extrapolation
Forced extrapolation means that it is extrapolated up to the maximum value in C05000 irrespective
whether the input signal has changed or not.
• The forced extrapolation is activated by setting bForced to TRUE.
• This FB serves to smooth the stepping by
extrapolation.
• The number of the extrapolation cycles to
be set in C05000 are defined according to
the following formula:
t
dnPosIn_p
5 cycles
dnPosOut_p
C05000
Bus cycle [ms]
Task cycle [ms]
--------------------------------------
=
Note!
Ensure that an integer value results for the number of extrapolation cycles so that the
position information increases linearly and a speed calculation can be carried out cor-
rectly. In the case of integer conditions, an alternating speed characteristic results.
• If a smaller value is set than calculated according to the formula mentioned above,
the extrapolation limit is reached and this is displayed by the output bLimit. In this ca-
se, dnPosIn_p is directly connected through to dnPosOut_p.
• If a higher value is set than calculated according to the formula mentioned above, it
has no impact.