5function blocks – Lenze E94A User Manual
Page 638
5
Function blocks
5.207
L_WndFrictionCompensation - friction compensation
638
Lenze · 9400 function library · Reference manual · DMS 6.7 EN · 08/2014 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
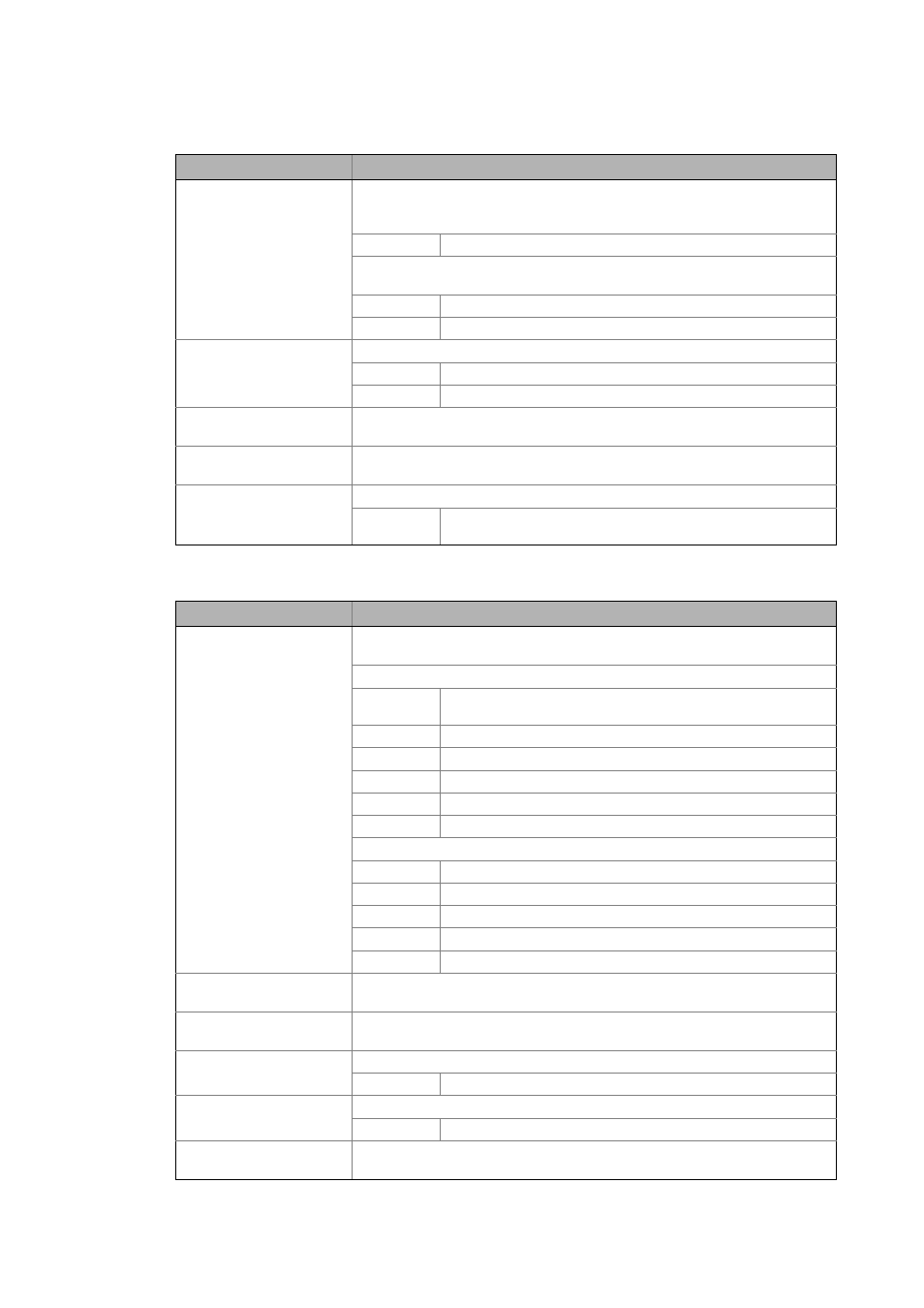
Outputs
dwSelectCurve
DWORD
Friction identification (bStartIdent = True):
Selection of the memory area within which the friction values identified are saved.
4 characteristics can be saved in the FB at the maximum.
1 ... 4 Memory area 1 ... 4
Friction compensation (bStartIdent = FALSE, bEnableFrictionCurve = TRUE):
Selection of the characteristic for the friction compensation.
0 Linear friction characteristic (adjustable in C04854 and C04855)
1 ... 4 Identified friction characteristic (memory area 1 ... 4)
bEnableFrictionCurve
BOOL
Activate friction compensation
FALSE Friction torque is reset to "0".
TRUE Friction compensation is activated.
dnSpeedSetpoint_n
DINT
Speed reference value for characteristic in [%]
• 100 % ≡ motor reference speed (C00011)
dnFrictionAdapt_n
DINT
Input for the proportional evaluation of the characteristic in [%]
• Internal limitation to 0 ... 200 %
bNegOutput
BOOL
Inversion of the output signal
TRUE Output signal dnFrictionTorque_n is displayed in an inverted man-
ner.
Identifier/data type
Value/meaning
dnState
DINT
Status (bit coded)
• Bits that are not listed have not been assigned with a status (always "0").
Status messages:
Bit 0 Identification started. Waiting for activation of the basic function
"Speed follower".
Bit 1 Waiting for motor standstill.
Bit 2 Drive is accelerated to the specified speed.
Bit 3 Drive has reached the specified speed and is braked to standstill.
Bit 4 The friction torque is calculated.
Bit 5 Identification completed successfully.
Error messages:
Bit 16 Identification cancelled (bStartIdent = FALSE).
Bit 17 Identification cancelled (bFollowerEnabled = FALSE).
Bit 18 Specified maximum speed not reached.
Bit 19 Acceleration time for the friction absorption too short.
Bit 20 Speed reached at the end of acceleration process too low.
bEnableFollower
BOOL
Interface for the basic function "Speed follower"
• Connect this output to the input SF_bEnable of SB LS_SpeedFollower.
dnSpeedSet_n
DINT
Interface for the basic function "Speed follower"
• Connect this output to the input SF_dnSpeedSet_n of SB LS_SpeedFollower.
bBusy
BOOL
Status signal "Detection of measured value active"
TRUE Detection of measured value active.
bDone
BOOL
Status signal "Identification completed successfully"
TRUE Identification completed successfully.
dnFrictionTorque_n
DINT
Current friction torque in [%]
• 100 % ≡ motor reference torque (C00057/2)
Identifier/data type
Information/possible settings