3 touch probe positioning, 4 touch probe configuration, Touch probe positioning – Lenze E94A User Manual
Page 419: 5function blocks
Lenze · 9400 function library · Reference manual · DMS 6.7 EN · 08/2014 · TD05
419
5
Function blocks
5.112
L_PosProfileInterface - profile data interface
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.112.3
Touch probe positioning
With touch probe positioning, the profile is first processed according to the set profile parameters.
If a touch probe is detected during profile processing, the profile automatically changes to the "se-
quence profile with TP", which has been defined via the NextTPProfileData input.
• If no touch probe is detected, positioning is continued with the sequence profile which has been
defined via the NextProfileData input (profile linkage).
• In order to define the sequence profiles, both inputs NextTPProfileData and NextProfileData can
be connected, for instance, with the ProfileData output of another instance of the
FB L_PosProfileInterface.
5.112.4
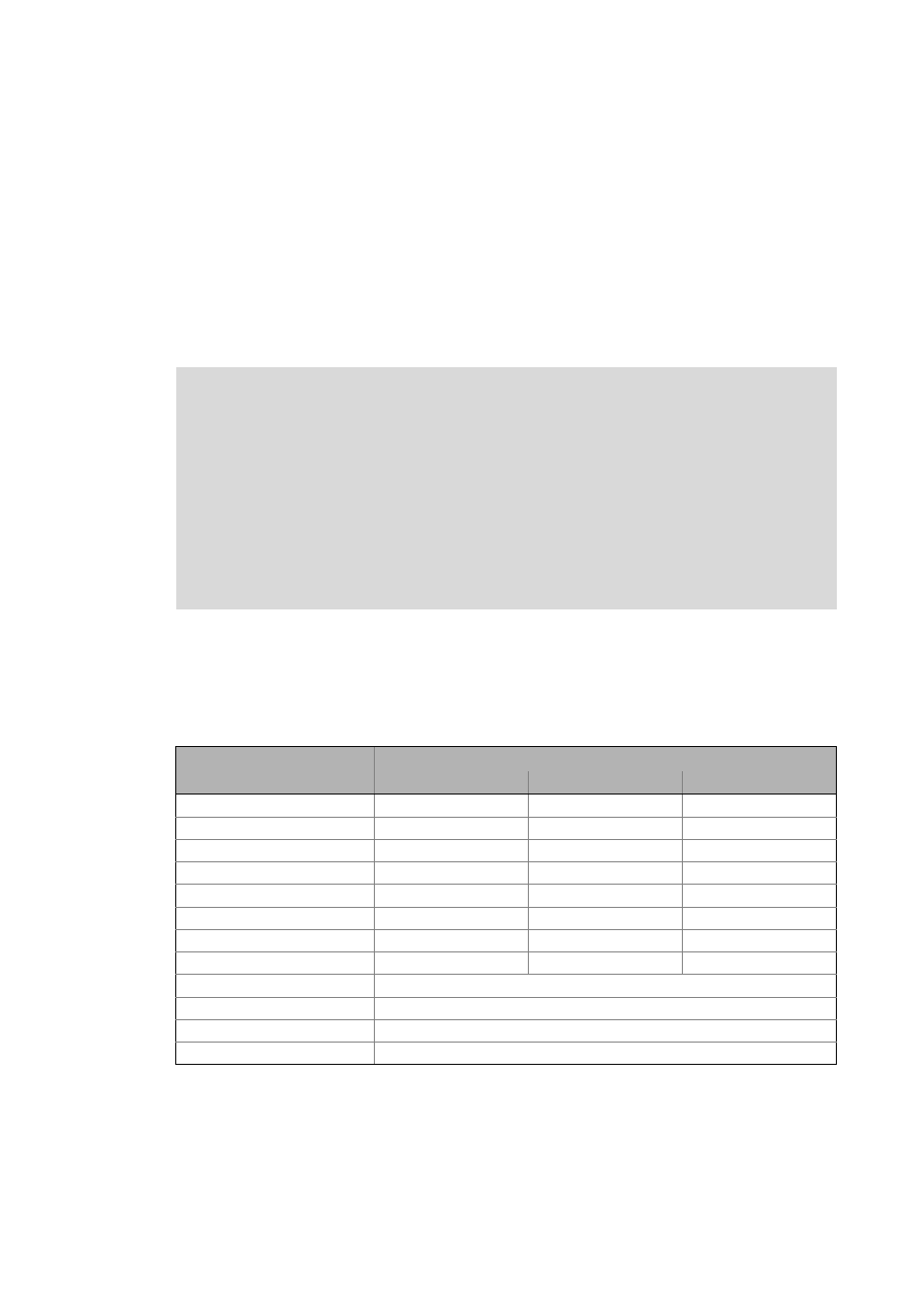
Touch probe configuration
The touch probe channel to be used for positioning with touch probe detection is selected bit-coded
via the dwTPConfig input. The following table contains all possible configurations with the corres-
ponding decimal values:
• Example: For the selection of the touch probe channel "DIGIN 8" and the response to only one
positive edge, the decimal value "16384" must be set at the dwTPConfig input.
Note!
If a profile is travelled with high speed and touch probe positioning is started, the resi-
dual path of which is smaller than the result from current speed and set deceleration
ramp, the target position is "overtravelled".
• Normally a reversing movement occurs, i.e. the drive returns.
• If, for instance, a CCW rotation of the drive is forbidden by the safety module, the tar-
get cannot be approached since in this case the reversing movement is not permissib-
le.
Further constellations are possible in connection with profile chaining in which an ap-
proach of the target position is impossible.
Selection
Touch probe channel
Touch probe response
Positive edge
Negative edge
Both edges
DIGIN 1
1
2
3
DIGIN 2
4
8
12
DIGIN 3
16
32
48
DIGIN 4
64
128
192
DIGIN 5
256
512
768
DIGIN 6
1024
2048
3072
DIGIN 7
4096
8192
12288
DIGIN 8
16384
32768
49152
Motor encoder zero pulse
65536
Load encoder zero pulse
262144
DFIN zero pulse
1048576
DFOUT zero pulse
4194304