5function blocks – Lenze E94A User Manual
Page 468
5
Function blocks
5.125
L_SdIntegrateLimit - integration of speed to position
468
Lenze · 9400 function library · Reference manual · DMS 6.7 EN · 08/2014 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
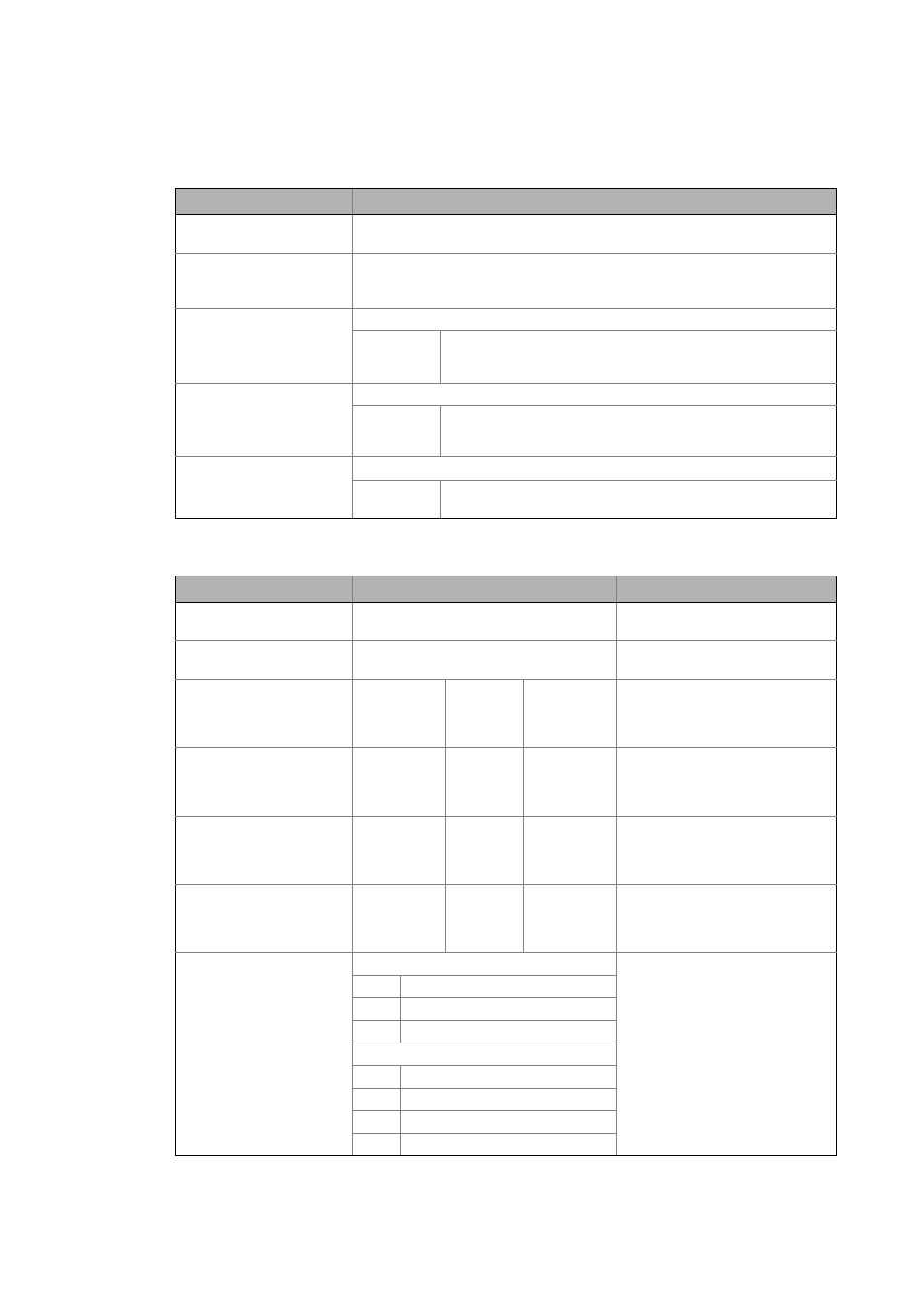
Outputs
Parameters
Identifier/data type
Value/meaning
dnPosOut_p
DINT
Position in [inc]
• Overflow at dnUpperLimit_p and dnLowerLimit_p.
dnSpeedOut_s
DINT
Speed output in [rpm]
• C04326/2 indicates the speed in the real unit of the machine.
• If bLoadStartPos = TRUE, "0" is provided.
bUpperLimit
BOOL
Status signal "Return from upper value is executed"
TRUE The integrator has exceeded the value at dnUpperLimit_p. The inte-
gration process is continued at dnLowerLimit_p without any loss of
increments.
bLowerLimit
BOOL
Status signal "Return from lower value is executed"
TRUE The integrator has exceeded the value at dnLowerLimit_p. The inte-
gration process is continued at dnUpperLimit_p without any loss of
increments.
bError
BOOL
"Error" status
TRUE An error has occurred (group signal).
• For details see display parameter C04329.
Parameter
Possible settings
Info
C04325/1
Character string
Position unit
• Read only
C04325/2
Character string
Speed unit
• Read only
C04326/1
-214748.3647
Unit/t
214748.3647 Speed input
• Display of the dnSpeedIn_s input
signal in the real unit of the ma-
chine.
C04326/2
-214748.3647
Unit/t
214748.3647 Output speed
• Display of the dnSpeedOut_s out-
put signal in the real unit of the
machine.
C04327/1
-214748.3647
Unit
214748.3647 Starting position
• Display of the dnStartPos_p input
signal in the real unit of the ma-
chine.
C04327/2
-214748.3647
Unit
214748.3647 Output position
• Display of the dnPosOut_p output
signal in the real unit of the ma-
chine.
C04329
Status messages:
Status (bit-coded)
• Bits that are not listed are reser-
ved for future extensions.
• The bError error output will only
be set to TRUE if an error message
(bit 15 ... 31) is issued.
• Bit 31 is the default setting if one
or more other error bits (bit 15 ...
30) are set.
Bit 6 Upper limit reached/exceeded
Bit 7 Lower limit reached/exceeded
Bit 10 Zero crossing active
Error messages:
bit16 Position is beyond the cycle
bits17 Initial speed too high
Bit 23 Invalid axis data structure
bits31 General error