L_sdintegratelimit, 5function blocks – Lenze E94A User Manual
Page 467
Lenze · 9400 function library · Reference manual · DMS 6.7 EN · 08/2014 · TD05
467
5
Function blocks
5.125
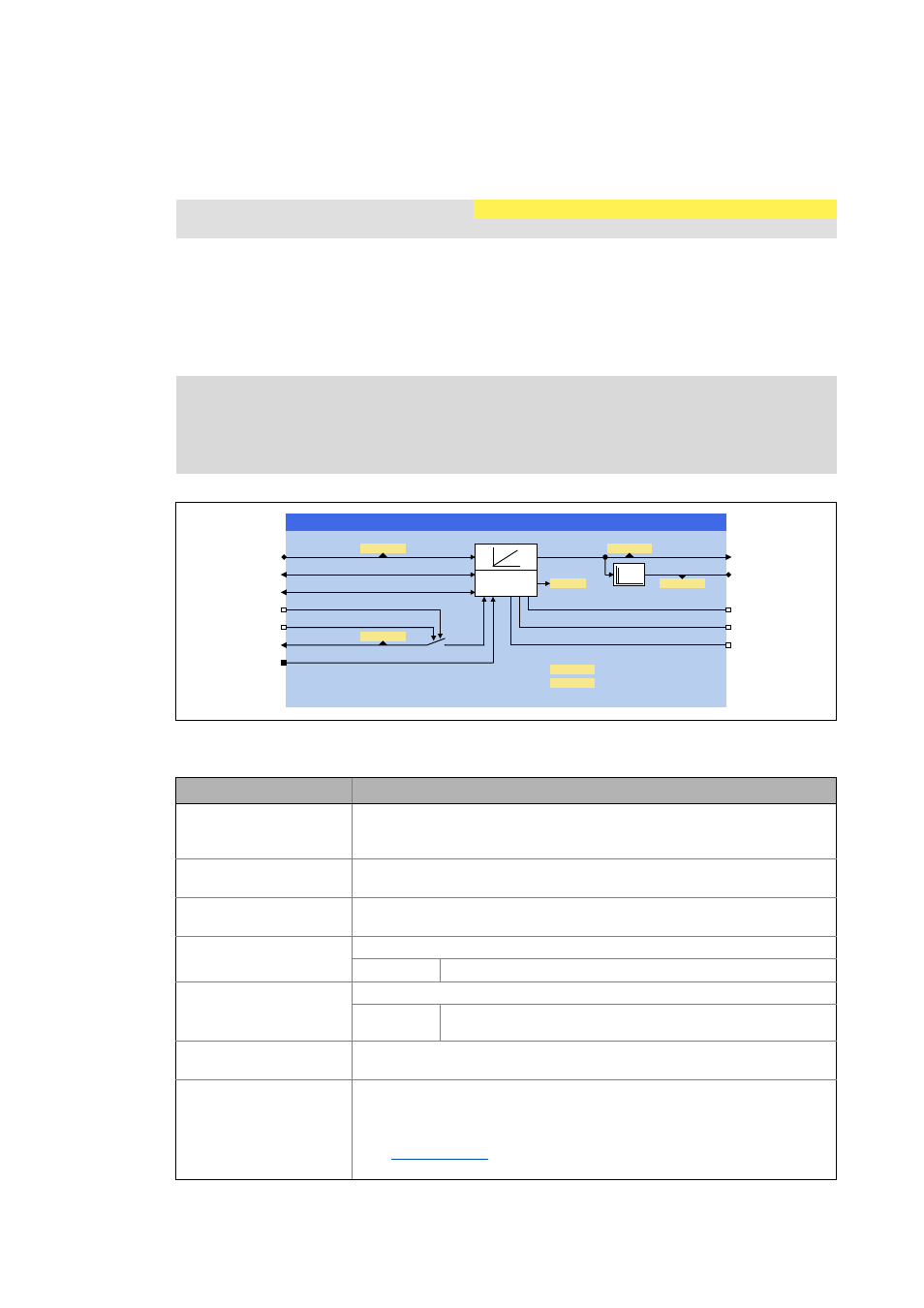
L_SdIntegrateLimit - integration of speed to position
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.125
L_SdIntegrateLimit - integration of speed to position
This FB integrates a speed to a position.
• The cycle (return) can be defined via inputs dnUpperLimit_p and dnLowerLimit_p.
• The starting position applied at the dnStartPos_p input can be loaded into the integrator in a le-
vel-triggered manner via the bLoadStartPos input or in an edge-triggered manner via the
bSetStartPos input.
Inputs
Function library:
LenzeServoDrive
FB available from library V02.09.xx.xx!
Runtime software licence:
Motion Control HighLevel
Motion Control TopLevel
Note!
During modulo operation, a cycle defined in the machine parameters that are applied
(AxisData) will not be taken into account!
Identifier/data type
Information/possible settings
dnSpeedIn_s
DINT
Speed in [rpm]
• 15000 rpm ≡ 2
26
≡ 67108864
• Display parameter: C04326/1
dnUpperLimit_p
DINT
Upper limit in [increments] for the position signal return
dnLowerLimit_p
DINT
Lower limit in [increments] for the position signal return
bLoadStartPos
BOOL
Load the integrator with starting position (level-triggered)
TRUE Load the integrator with the value at the dnStartPos_p input.
bSetStartPos
BOOL
Load the integrator with starting position (edge-triggered)
FALSETRUE Load the integrator with the value at the dnStartPos_p input. The
speed is continued to be integrated immediately.
dnStartPos_p
DINT
Starting position in [increments] used to load the integrator by setting
bLoadStartPos to TRUE or by a FALSE-TRUE edge at bSetStartPos.
AxisData
Machine parameters
• For accepting the machine parameters of the drive/motor, connect this input
with the output DI_AxisData of the SB LS_DriveInterface.
• The machine parameters of a master drive can be displayed with the
FB
. In this case, the FB output AxisData must be connected to
this input.
GQ3RV2XWBS
GQ6SHHG,QBV
E6HW6WDUW3RV
GQ6WDUW3RVBS
$[LV'DWD
/B6G,QWHJUDWH/LPLW
E8SSHU/LPLW
GQ6SHHG2XWBV
&
&
&
&
&
6WDWH
&75/
GQ8SSHU/LPLWBS
GQ/RZHU/LPLWBS
E/RDG6WDUW3RV
E(UURU
E/RZHU/LPLW
& 6SHHGXQLW
& 3RVLWLRQXQLW