4short overview – Lenze E94A User Manual
Page 118
4
Short overview
4.12
All function blocks [A-Z]
118
Lenze · 9400 function library · Reference manual · DMS 6.7 EN · 08/2014 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
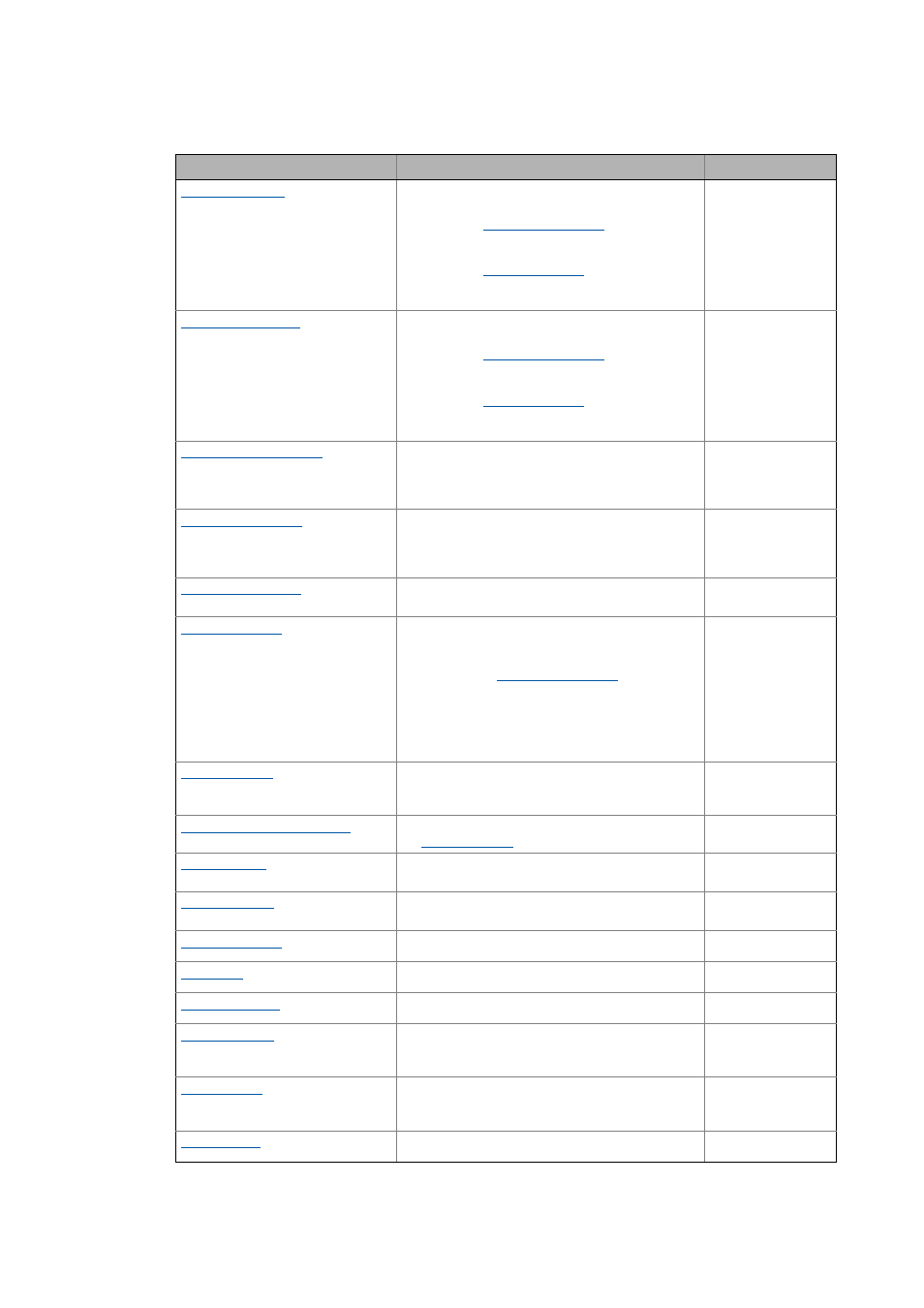
Position table
• Together with an FB instance
• ...of type
this FB provides
five position values from the VTPOS variable ta-
ble.
• ...of type
this FB provides po-
sitions which are directly defined in the profi-
les.
LenzePositioning
V01.00.xx.xx
Speed table
• Together with an FB instance
• ...of type
this FB provides
five speed values from the VTSPEED variable ta-
ble.
• ...of type
this FB provides
speeds which are directly defined in the profi-
les.
LenzePositioning
V01.00.xx.xx
Interface to basic function "Positioning"
• Use this interface to control the SB LS_Positioner
via level-controlled signals, e.g. from a higher-le-
vel control.
LenzePositioning
V02.00.xx.xx
Profile data record management
• Storing and managing (traversing) profiles and
"teaching" positions, speeds, accelerations/dece-
lerations and S-ramp times.
LenzePositioning
V01.00.xx.xx
Profile data interface
• Profile data selection for the SB LS_Positioner.
LenzePositioning
V01.00.xx.xx
Profile data record management (simple)
• Storing and managing up to four traversing profi-
les and "teaching" target positions.
• Unlike the FB
, this FB does
not use any variable tables, but profile parameter
data is directly entered under the assigned codes.
• Furthermore, the position assigned to the input
dnExtPos_p will be used as target position if profi-
le number 1 is selected.
LenzePositioning
V01.00.xx.xx
Sequence control
• Parameterisable sequence table for implemen-
ting a sequence control.
LenzePositioning
V01.00.xx.xx
Status signals of the sequence control
(FB
)
LenzePositioning
V02.00.xx.xx
Acceleration conversion
• Speed variation/time acceleration [unit/s
2
]
LenzeServoDrive
V01.00.xx.xx
Extrapolation
• The FB extrapolates a signal by the time set.
LenzeServoDrive
V01.00.xx.xx
Differentiation (position speed)
LenzeServoDrive
V01.00.xx.xx
Stretch factor
LenzeServoDrive
V01.00.xx.xx
Reading out machine parameters from axis data
LenzeServoDrive
V02.07.xx.xx
Position conversion
• Position [increments] position [unit] (displayed
as parameter value)
LenzeServoDrive
V01.00.xx.xx
Speed conversion
• Speed velocity [unit/s] (displayed as parameter
value)
LenzeServoDrive
V01.00.xx.xx
Integration (speed position)
LenzeServoDrive
V01.00.xx.xx
Function block
Function
From library