89 l_ldintegratecyclic - cyclic integration, L_ldintegratecyclic, 5function blocks – Lenze E94A User Manual
Page 322
5
Function blocks
5.89
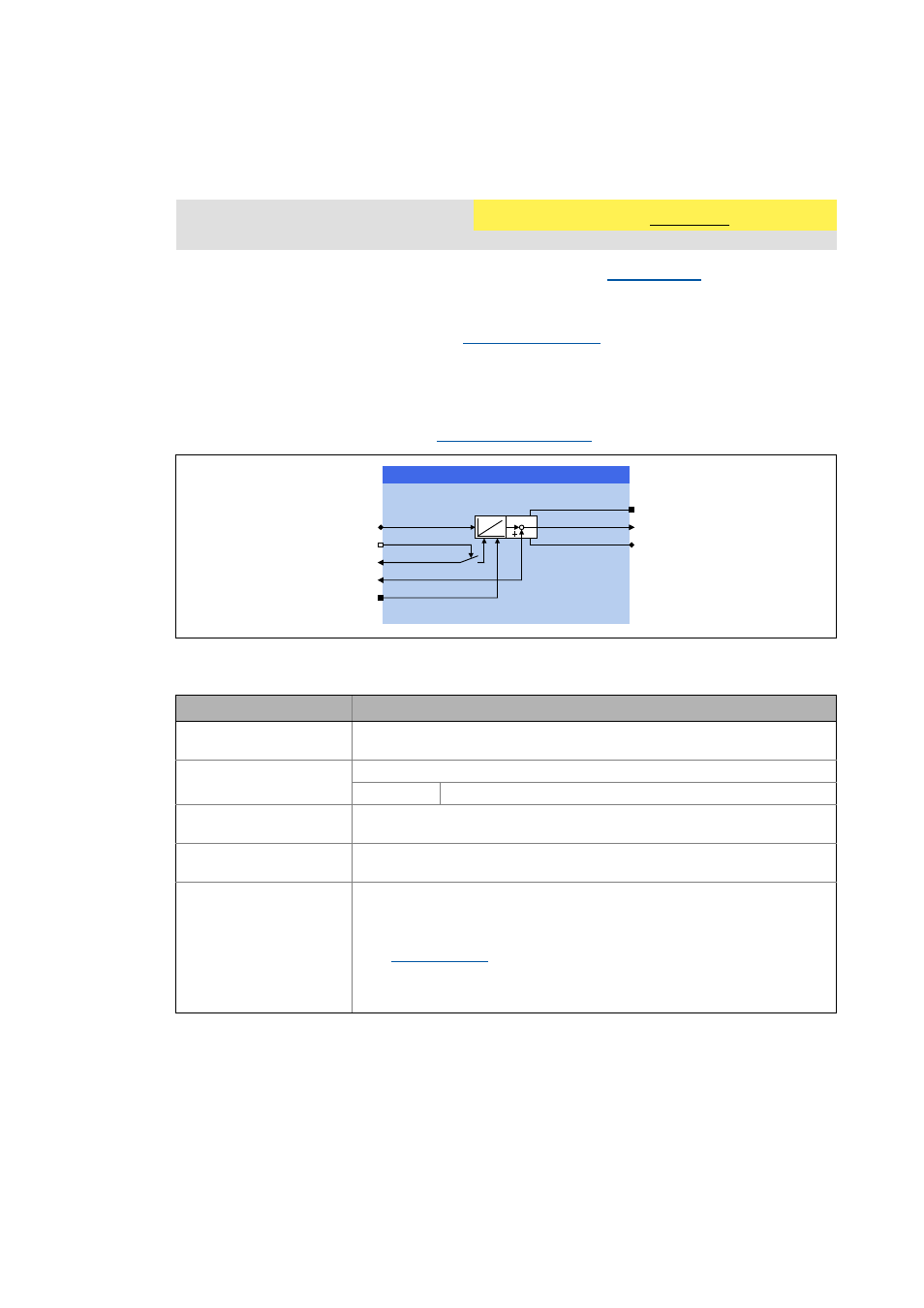
L_LdIntegrateCyclic - cyclic integration
322
Lenze · 9400 function library · Reference manual · DMS 6.7 EN · 08/2014 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.89
L_LdIntegrateCyclic - cyclic integration
This FB integrates a speed in a position (by analogy with the FB
) in consideration of
the cycle.
• It is possible to add a position offset to the output position, e.g. for trimming purposes. This
function corresponds exactly to the FB
• The cycle and shift factor for the position resolution are read out of the machine parameters
(AxisData).
• The clock pulse is created with remainder processing.
• The FB is the counterpart of the FB
Inputs
Function library:
LenzeLineDrive
Do not use FB for new developments!
Replacement by L_SdIntegrateAxis.
Runtime software licence:
Motion Control HighLevel
Motion Control TopLevel
Identifier/data type
Information/possible settings
dnSpeedIn_s
DINT
Speed
• 15000 rpm ≡ 2
26
≡ 67108864
bLoadStartPos
BOOL
Load the integrator with starting position
TRUE Load the integrator with the value at the dnStartPos_p input.
dnStartPos_p
DINT
Starting position in [inc] with which the integrator is loaded by setting
bLoadStartPos to TRUE.
dnPosOffset_p
DINT
Position offset in [inc]
AxisData
Machine parameters
• For accepting the machine parameters of the drive/motor, connect this input
with the output DI_AxisData of the SB LS_DriveInterface.
• The machine parameters of a master drive can be displayed with the
FB
. In this case, the FB output AxisData must be connected to
this input.
• If this input is released, the following scaling applies:
1 motor revolution ≡ 2
16
GQ3RV2XWBS
GQ6WDWH
GQ6SHHG,QBV
E/RDG6WDUW3RV
GQ6WDUW3RVBS
$[LV'DWD
/B/G,QWHJUDWH&\FOLF
GQ3RV2IIVHWBS
GQ6SHHG2XWBV