137 l_sdsetposition - position conversion, L_sdsetposition, Converts the – Lenze E94A User Manual
Page 518: 5function blocks
5
Function blocks
5.137
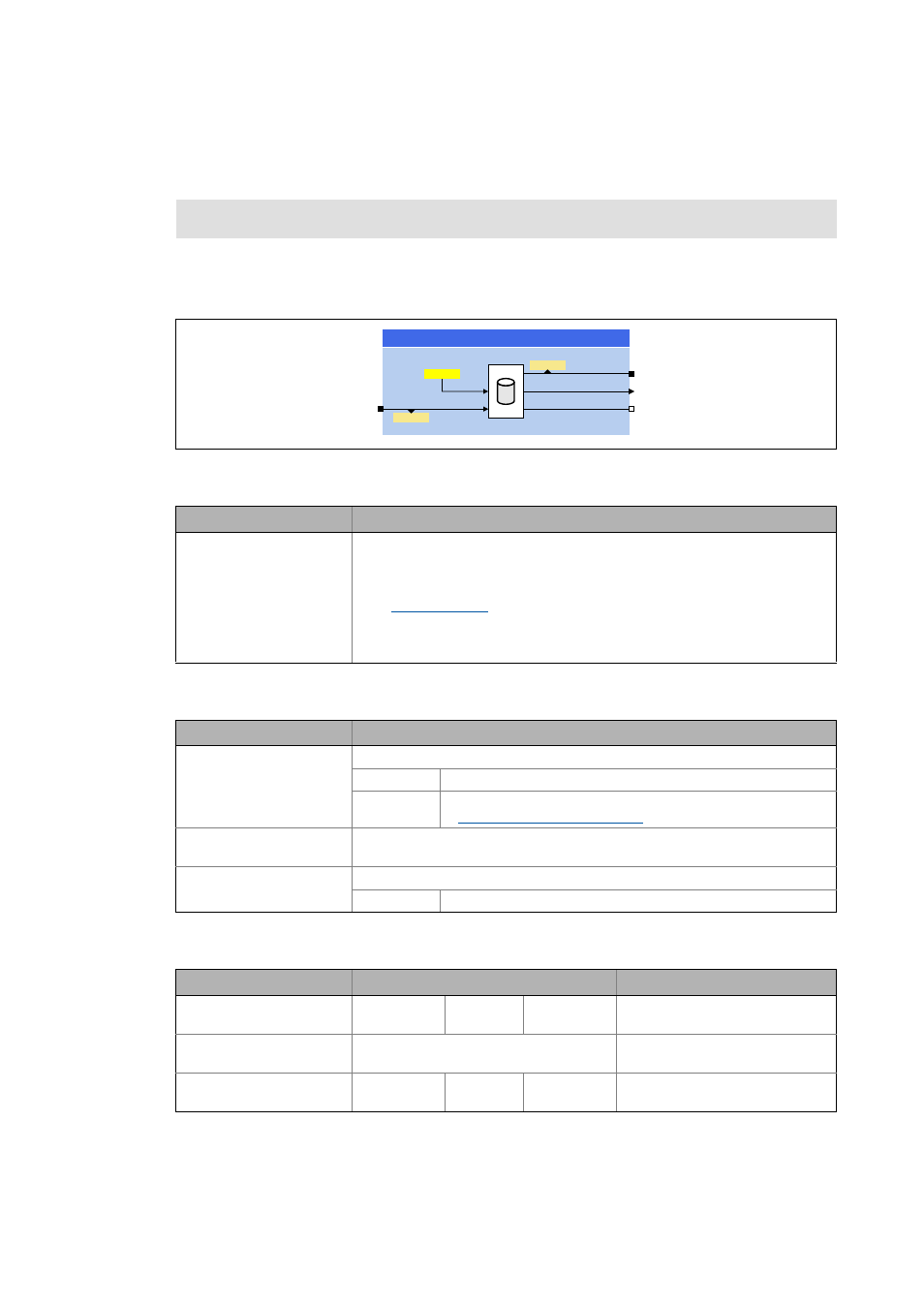
L_SdSetPosition - position conversion
518
Lenze · 9400 function library · Reference manual · DMS 6.7 EN · 08/2014 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.137
L_SdSetPosition - position conversion
This FB uses the transmitted machine parameters and converts a position which has been selected
via C04276 in the real machine units into a position in [inc] and outputs it at dnSetPosOut_p
for
further processing within the FB interconnection.
Inputs
Outputs
Parameter
Function library:
LenzeServoDrive
Runtime software licence:
Motion Control HighLevel
Motion Control TopLevel
Identifier/data type
Information/possible settings
AxisData
Machine parameters
• For accepting the machine parameters of the drive/motor, connect this input
with the output DI_AxisData of the SB LS_DriveInterface.
• The machine parameters of a master drive can be displayed with the
FB
. In this case, the FB output AxisData must be connected to
this input.
• If this input is released, the following scaling applies:
1 motor revolution ≡ 2
16
Identifier/data type
Value/meaning
dnState
DINT
Status
0 Ok - no error
-12 Counter overflow of ±214748.3647 with position value (C04276).
Monitoring for counter overflow ( 519)
dnPosOut_p
DINT
Position in [inc]
• Scaling: 1 encoder revolution ≡ 2
16
increments (or acc. to AxisData)
bError
BOOL
"Error" status signal
TRUE The conversion was incorrect.
Parameter
Possible settings
Information
C04276
-214000.0000
Unit
214000.0000 Position value
• Initialisation: 0 unit
C04277
As of library V02.02.xx.xx
String of digits
Position unit
• Read only
C04278
-2147483647
2147483647 Status
• Read only
/B6G6HW3RVLWLRQ
GQ6WDWH
E(UURU
$[LV'DWD
GQ3RV2XWBS
&
&
3RVLWLRQYDOXH
& 3RVLWLRQXQLW