81 l_esencoderconv - encoder signal conditioning, L_esencoderconv, 5function blocks – Lenze E94A User Manual
Page 298
5
Function blocks
5.81
L_EsEncoderConv - encoder signal conditioning
298
Lenze · 9400 function library · Reference manual · DMS 6.7 EN · 08/2014 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.81
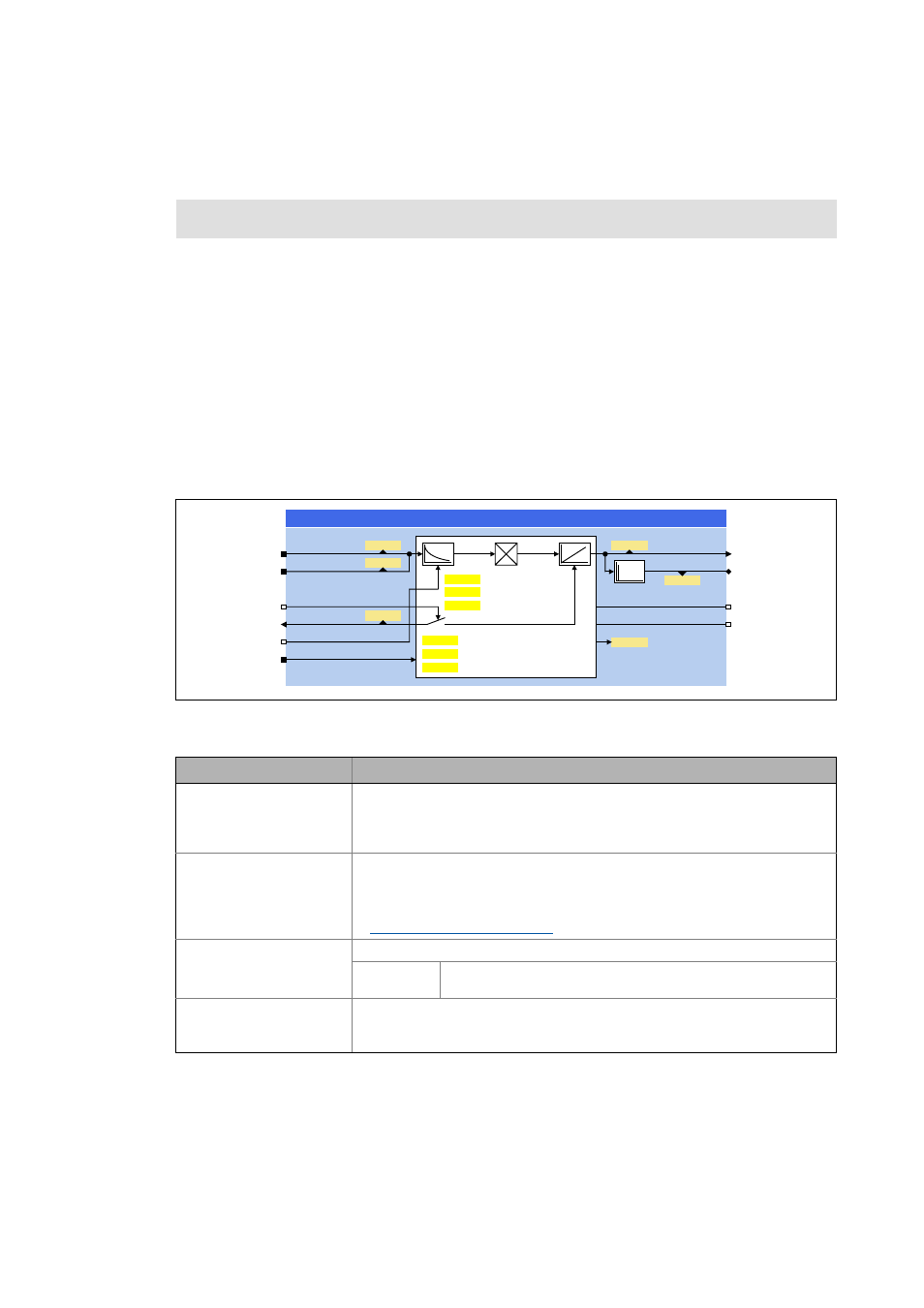
L_EsEncoderConv - encoder signal conditioning
This FB converts an actual position that is imported via a bus system, like for example system bus
(CAN), Profibus, or ETHERNET Powerlink, by an external encoder, by means of the machine parame-
ters transferred and the encoder resolution parameterised into a position in [increments] and pro-
vides it for further processing within the function block interconnection at the output dnPosOut_p
.
• Via the input bLoadStartPos the position output can be set to the starting position pending at
the input dnStartPos_p.
• The position that is output can be initialised/adjusted to the input value of an absolute value
encoder via the bLoadEncoderPos input.
• In addition to the position, the resulting speed is shown at the output dnSpeedOut_s.
• The FB can process absolute value encoders and incremental encoders (single and multiturn en-
coders).
Inputs
Function library:
LenzeElectricalShaft
Runtime software licence:
Motion Control HighLevel
Motion Control TopLevel
Identifier/data type
Information/possible settings
dnEncoderIn
DINT
External encoder signal (encoder counter)
• As soon as the input value at the bus is changed, a valid encoder signal is recog-
nised.
• Display parameter: C05280
dnEncoderIn2
DINT
From library V01.03.xx.xx
2nd external encoder signal
• This input is only evaluated if "1: 64 bit encoder signal" has been selected in
C05271.
• Display parameter: C05284
64 bit encoder signal evaluation ( 302)
bLoadStartPos
BOOL
Load integrator with starting position and reset error output.
TRUE Load the integrator with the value applied to input dnStartPos_p and
reset bError to FALSE.
dnStartPos_p
DINT
Starting position in [inc] with which the integrator is loaded by setting
bLoadStartPos to TRUE.
• C05281 indicates the starting position in the real unit of the machine.
GQ3RV2XWBS
E,QLW
GQ(QFRGHU,Q
E/RDG6WDUW3RV
GQ6WDUW3RVBS
$[LV'DWD
/B(V(QFRGHU&RQY
E(UURU
GQ6SHHG2XWBV
& (QFRGHUPRXQWLQJGLUHFWLRQ
& 6LQJOHWXUQUHVROXWLRQ
& (QFRGHULQLWLDOLVDWLRQWLPH
& 0XOWLWXUQUHVROXWLRQ
& 3RVLWLRQDIWHUPDLQVVZLWFKLQJ
&
&
&
&
& 6WDWH
GQ(QFRGHU,Q
&
& (QFRGHUSRVHYDO
E/RDG(QFRGHU3RV