9400 highline | parameter setting & configuration – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 85
L
Firmware 1.37 - 09/2006
85
9400 HighLine | Parameter setting & configuration
Motor interface
Initial commissioning | Optimise current controller
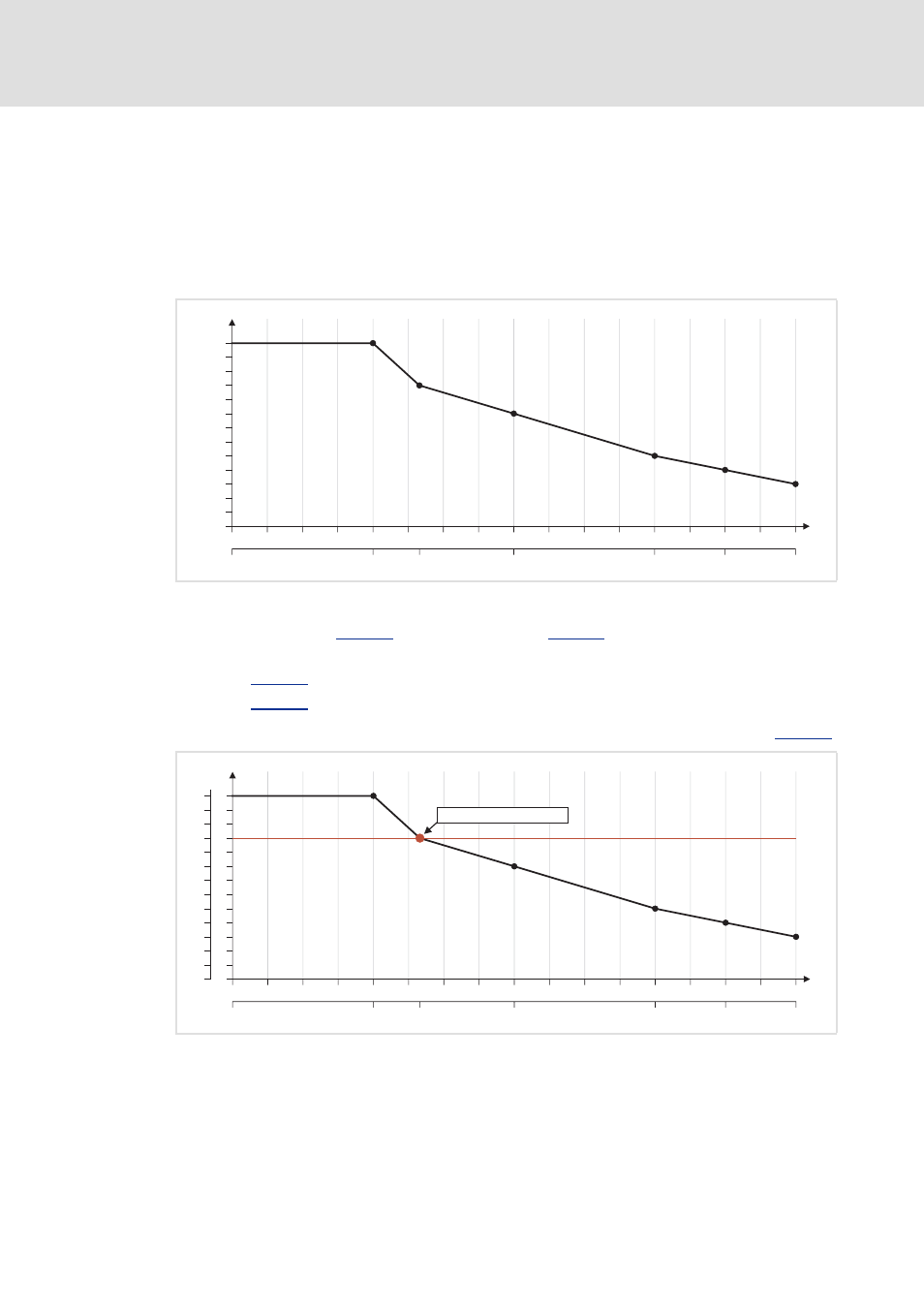
4. Creating a characteristic based on the values calculated for Vp.
– Here, the values which have not been adjusted, must be determined by interpolation
between two values.
– Note: In this example it is assumed that the inductance does not change
considerably below 3.75 A. For this reason, the same Vp value resulting from the
measurement with a motor current of 3.75 A has been used for all grid points below
3.75 A.
[5-4]
Determined saturation characteristic
5. Set the gain Vp in
which were calculated during
the adjustment with the rated motor current (in this example "5 A"):
– Set
= "10 V/A".
– Set
= "5 ms".
6. Scale the Vp values on the Y axis of the characteristic to the 100 % Vp setting in
[5-5]
Scaling of the determined saturation characteristic to the "100 %" setting in C00075
15 A
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
7.5 A
3.75 A
11.25 A
12.38 A
5 A
0
6.25
12.5
18.75
25
31.25
37.5
43.75
50
56.25
62.5
68.75
75
81.25
87.5
93.75
100
Vp [V/A]
0 A
0
1
2
3
4
5
6
7
8
9
10
11
12
13
1
I
max
[%]
15 A
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
7.5 A
3.75 A
11.25 A
12.38 A
5 A
0
6.25
12.5
18.75
25
31.25
37.5
43.75
50
56.25
62.5
68.75
75
81.25
87.5
93.75
100
Vp [%]
0 A
0
1
2
3
4
5
6
7
8
9
10
11
12
13
0
10
20
30
40
50
60
70
80
90
100
110
120
130
C00075 = "10 V/A"
100 %
º
1
I
max
[%]