9400 highline | parameter setting & configuration, Parameter reference attribute table – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 653
L
Firmware 1.37 - 09/2006
653
9400 HighLine | Parameter setting & configuration
Parameter reference
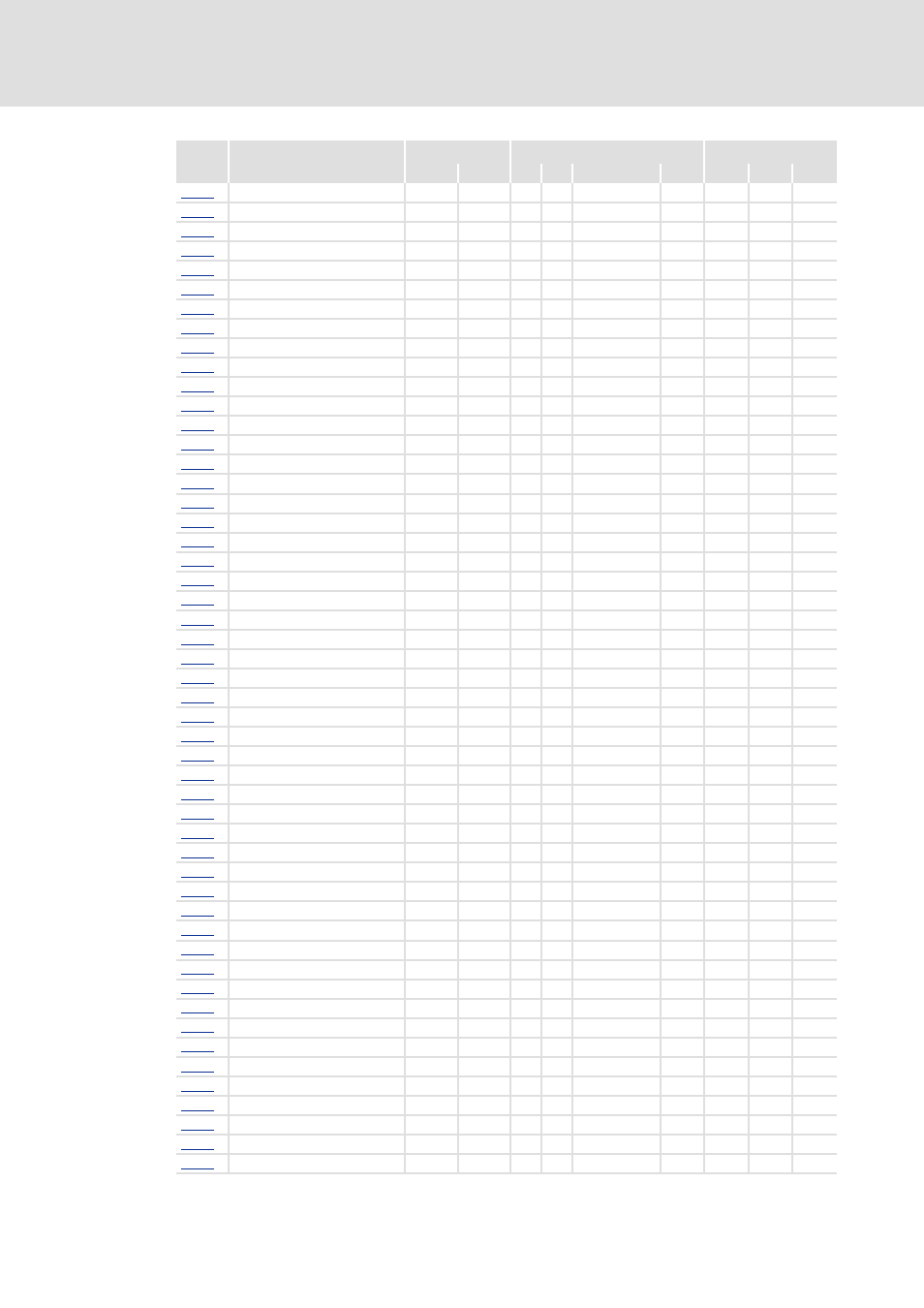
Attribute table
Torque setpoint
23879
5D47
E
1
INTEGER_32
100
;
Filtered torque setpoint
23878
5D46
E
1
INTEGER_32
100
;
Actual torque
23877
5D45
E
1
INTEGER_32
100
;
MCTRL_dnMotorPosAct
23805
5CFD
A
2
UNSIGNED_32
1
;
MCTRL_dnLoadPosAct
23804
5CFC
A
2
UNSIGNED_32
1
;
MCTRL_dnMotorSpeedAct
23803
5CFB
E
1
INTEGER_32
1
;
MCTRL_dnLoadSpeedAct
23802
5CFA
E
1
INTEGER_32
1
;
MCTRL_dnTorqueAct
23801
5CF9
E
1
INTEGER_32
100
;
MCTRL_dnOutputSpeedCtrl
23800
5CF8
E
1
INTEGER_32
100
;
MCTRL_dnInputJerkCtrl
23799
5CF7
E
1
INTEGER_32
100
;
MCTRL_dnInputTorqueCtrl
23798
5CF6
E
1
INTEGER_32
100
;
MCTRL_dnFluxAct
23797
5CF5
E
1
INTEGER_32
100
;
MCTRL_dnDCBusVoltage
23796
5CF4
E
1
INTEGER_32
1
;
MCTRL_dnImotAct
23795
5CF3
E
1
INTEGER_32
100
;
MCTRL_dwMaxMotorSpeed
23794
5CF2
E
1
UNSIGNED_32
1
;
MCTRL_dwMaxMotorTorque
23793
5CF1
E
1
UNSIGNED_32
1000
;
MCTRL_dwMotorVoltageAct
23792
5CF0
E
1
UNSIGNED_32
1
;
MCTRL_dnMotorFreqAct
23791
5CEF
E
1
INTEGER_32
10
;
MCTRL_dnIxtLoad
23789
5CED
E
1
INTEGER_32
100
;
MCTRL_dnFlyingSpeedAct
23788
5CEC
E
1
INTEGER_32
1
;
MCTRL_ dwMaxEffMotorTorque
23787
5CEB
E
1
INTEGER_32
1000
;
MCTRL_ dwMaxDeviceCurrent
23786
5CEA
E
1
INTEGER_32
100
;
MCTRL_dnI2xtLoad
23785
5CE9
E
1
INTEGER_32
100
;
MCTRL_dnDeltaMotorPos_p
23784
5CE8
E
1
INTEGER_32
1
;
MCTRL_dnOutputPosCtrlMotor_s
23783
5CE7
E
1
INTEGER_32
1
;
MCTRL_dnPosSet
23775
5CDF
A
2
UNSIGNED_32
1
;
MCTRL_dnSpeedAdd
23773
5CDD
E
1
INTEGER_32
1
;
MCTRL_dnTorqueAdd
23772
5CDC
E
1
INTEGER_32
1000
;
MCTRL_dnAccelerationAdd
23771
5CDB
E
1
INTEGER_32
1000
;
MCTRL_dnSpeedLowLimit
23770
5CDA
E
1
INTEGER_32
1
;
MCTRL_dnTorqueLowLimit
23769
5CD9
E
1
INTEGER_32
100
;
MCTRL_dnTorqueHighLimit
23768
5CD8
E
1
INTEGER_32
100
;
MCTRL_dnPosCtrlOutLimit
23767
5CD7
E
1
INTEGER_32
1
;
MCTRL_dnTorqueCtrlAdapt
23766
5CD6
E
1
INTEGER_32
100
;
MCTRL_dnSpeedCtrlAdapt
23765
5CD5
E
1
INTEGER_32
100
;
MCTRL_dnPosCtrlAdapt
23764
5CD4
E
1
INTEGER_32
100
;
MCTRL_dnMotorPosRefValue
23763
5CD3
A
2
UNSIGNED_32
1
;
MCTRL_dnLoadPosRefValue
23762
5CD2
A
2
UNSIGNED_32
1
;
MCTRL_dnBoost
23761
5CD1
E
1
INTEGER_32
1
;
MCTRL_dnSpeedCtrlIntegrator
23760
5CD0
E
1
INTEGER_32
1
;
MCTRL_dnFieldWeak
23759
5CCF
E
1
INTEGER_32
100
;
MCTRL_dnSpeedSet_s
23758
5CCE
E
1
INTEGER_32
1
;
ID status
23721
5CA9
E
1
UNSIGNED_32
1
;
Status DCTRL control input
23697
5C91
A
5
UNSIGNED_8
1
;
Speed limitation
23666
5C72
A
2
INTEGER_16
10
;
;
Sync source
23455
5B9F
E
1
UNSIGNED_8
1
;
;
Sync cycle time
23454
5B9E
E
1
UNSIGNED_32
1
;
;
Sync phase position
23453
5B9D
E
1
UNSIGNED_32
1
;
;
Sync window
23452
5B9C
E
1
UNSIGNED_32
1
;
;
Sync PLL increment
23451
5B9B
E
1
UNSIGNED_8
1
;
;
Motor thermal sensor
23385
5B59
E
1
UNSIGNED_32
1
;
;
Code
Name
Index
Data
Access
dec
hex
DS
DA
DT
Factor
R
W
CINH