2 actual value and status signals, 9400 highline | parameter setting & configuration – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 268
9400 HighLine | Parameter setting & configuration
Standard TAs
TA "Actuator – torque" | Assignment of the I/O terminals
268
Firmware 1.37 - 09/2006
L
11.3.2.2
Actual value and status signals
The following tables contain the Lenze assignment of the analog and digital outputs for
the technology application "actuator – torque".
r
The default signal configuration if required can be easily changed by parameterising
the multiplexer parameters assigned.
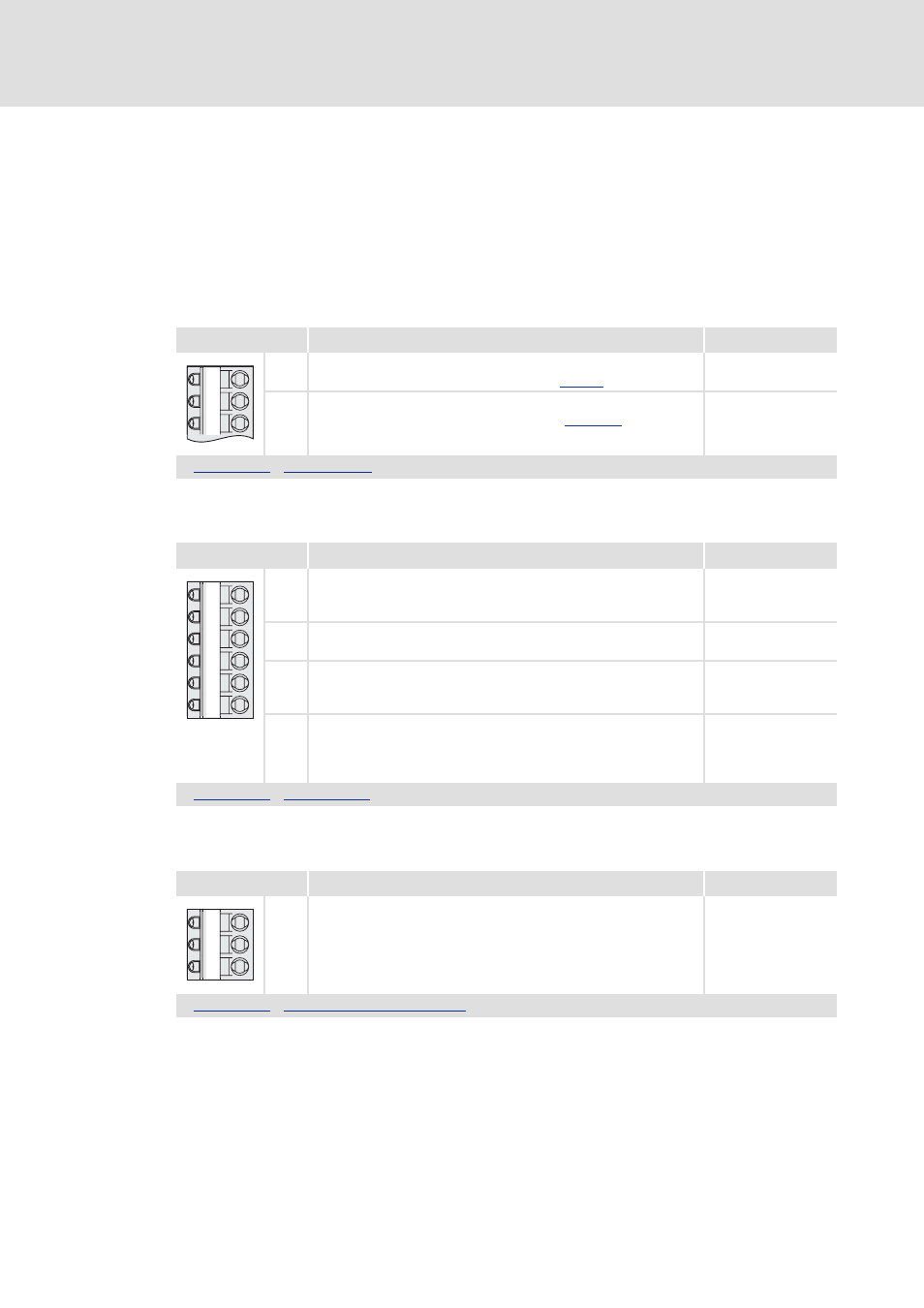
Analog outputs
Digital outputs
State bus
Terminal X3
Signal (Lenze setting)
Signal configuration
AO1
Motor speed
• Scaling: ±10 V ≡ motor reference speed (
)
C03110/1
AO2
Motor torque (setpoint)
• Scaling: ±10 V ≡ Motor reference torque (
C03110/2
I/O terminals Analog outputs (C 120)
Terminal X4
Signal (Lenze setting)
Signal configuration
DO1
Status "Drive ready"
• This operating state is active if the controller is enabled by setting
the digital input RFR to HIGH level and no error has occurred.
C03100/1
DO2
Status "Torque follower enabled"
• The torque follower has been enabled via the digital input DI2.
C03100/2
DO3
Status "Torque follower in limitation"
• If the torque follower is enabled, the torque setpoint or the
current setpoint are within the limitation.
C03100/3
DO4
Status "Error active acknowledgement is required"
• Monitoring with the error response "Error" or "Quick stop by
trouble" has been activated, and the controller is in the device
state "Error active" or "Quick stop by trouble active".
C03100/4
I/O terminals Digital outputs (C 125)
Terminal X2
Signal (Lenze setting)
Signal configuration
SB
Status "Torque follower in limitation"
• If the torque follower is enabled, the torque setpoint or the
current setpoint are within the limitation.
• The state bus is put in the "error" status.
C03100/5
I/O terminals Monitoring function "State bus" (C 127)
GA
AO1
AO2
GO
24O
DO1
DO2
DO3
DO4
GE
24E
SB