9400 highline | parameter setting & configuration, Parameter reference attribute table – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 654
9400 HighLine | Parameter setting & configuration
Parameter reference
Attribute table
654
Firmware 1.37 - 09/2006
L
Temperature for spec. characteristic
23384
5B58
A
2
UNSIGNED_32
1
;
;
Resistor for spec. characteristic
23383
5B57
A
2
UNSIGNED_32
1
;
;
Motor temp. feedback system
23382
5B56
E
1
UNSIGNED_16
1
;
;
;
Motor operating temperature
23381
5B55
E
1
INTEGER_32
1
;
;
Influence winding I²xt mon.
23380
5B54
E
1
UNSIGNED_32
1
;
;
S1 torque characteristic I²xt mon.
23379
5B53
A
8
UNSIGNED_32
1
;
;
Counter: Brake chopper overload
23372
5B4C
E
1
UNSIGNED_16
1
;
Counter: Ixt overload
23371
5B4B
E
1
UNSIGNED_16
1
;
Counter: DC bus overvoltage
23370
5B4A
E
1
UNSIGNED_16
1
;
Counter: Mains switching
23369
5B49
E
1
UNSIGNED_16
1
;
Counter: Heatsink overtemp.
23367
5B47
E
1
UNSIGNED_16
1
;
Counter: Housing overtemp.
23366
5B46
E
1
UNSIGNED_16
1
;
Electrolytic capacitor av. temp.
23365
5B45
E
1
UNSIGNED_8
1
;
Counter: Power section overload
23363
5B43
E
1
UNSIGNED_16
1
;
Internal clock
23361
5B41
E
1
VISIBLE_STRING
1
;
Resp. to comm. error with MXI1
23074
5A22
E
1
UNSIGNED_32
1
;
;
Resp. to comm. error with MXI2
23073
5A21
E
1
UNSIGNED_32
1
;
;
Ethernet IP address client x
23065
5A19
A
5
VISIBLE_STRING
1
;
Ethernet status client x
23064
5A18
A
5
UNSIGNED_8
1
;
Diagnostics X6: Max. baud rate
22673
5891
E
1
UNSIGNED_32
1
;
;
Diagnostics X6: Change baud rate
22672
5890
E
1
UNSIGNED_32
1
;
;
Diagnostics X6: Curr. baud rate
22670
588E
E
1
UNSIGNED_32
1
;
Program auto-start
22471
57C7
E
1
UNSIGNED_32
1
;
;
Program status
22467
57C3
E
1
UNSIGNED_8
1
;
Program runtime
22466
57C2
E
1
UNSIGNED_16
1
;
Program name
22462
57BE
E
1
VISIBLE_STRING
1
;
Runtime task 1
22454
57B6
A
2
UNSIGNED_32
1
;
Runtime task 2
22453
57B5
A
2
UNSIGNED_32
1
;
Runtime task 3
22452
57B4
A
2
UNSIGNED_32
1
;
Gearbox fact. numer. motor
22055
5627
E
1
INTEGER_32
1
;
;
;
Gearbox fact. denom. motor
22054
5626
E
1
INTEGER_32
1
;
;
;
Gearbox fact. numer. load
22053
5625
E
1
INTEGER_32
1
;
;
;
Gearbox fact. denom. load
22052
5624
E
1
INTEGER_32
1
;
;
;
Feed constant
22051
5623
E
1
UNSIGNED_32
10000
;
;
;
Unit
22050
5622
E
1
UNSIGNED_32
1
;
;
;
User-defined unit
22049
5621
E
1
VISIBLE_STRING
1
;
;
;
Motor mounting direction
22048
5620
E
1
UNSIGNED_32
1
;
;
;
Traversing range
22047
561F
E
1
UNSIGNED_32
1
;
;
;
Mounting direction of position
encoder
22046
561E
E
1
UNSIGNED_32
1
;
;
;
Active function state
22045
561D
E
1
INTEGER_32
1
;
Resulting gearbox factors
22044
561C
A
3
UNSIGNED_32
1000
;
Resolution of a unit
22043
561B
E
1
UNSIGNED_32
10000
;
Time unit
22042
561 A
E
1
UNSIGNED_32
1
;
User-defined time unit
22041
5619
E
1
VISIBLE_STRING
0
;
User-defined unit
22040
5618
E
1
VISIBLE_STRING
0
;
Cycle
22039
5617
E
1
UNSIGNED_32
10000
;
;
;
Speed unit
22038
5616
E
1
VISIBLE_STRING
0
;
Acceleration unit
22037
5615
E
1
VISIBLE_STRING
0
;
Max. presentable position
22036
5614
E
1
INTEGER_32
10000
;
Max. speed to be shown
22035
5613
E
1
INTEGER_32
10000
;
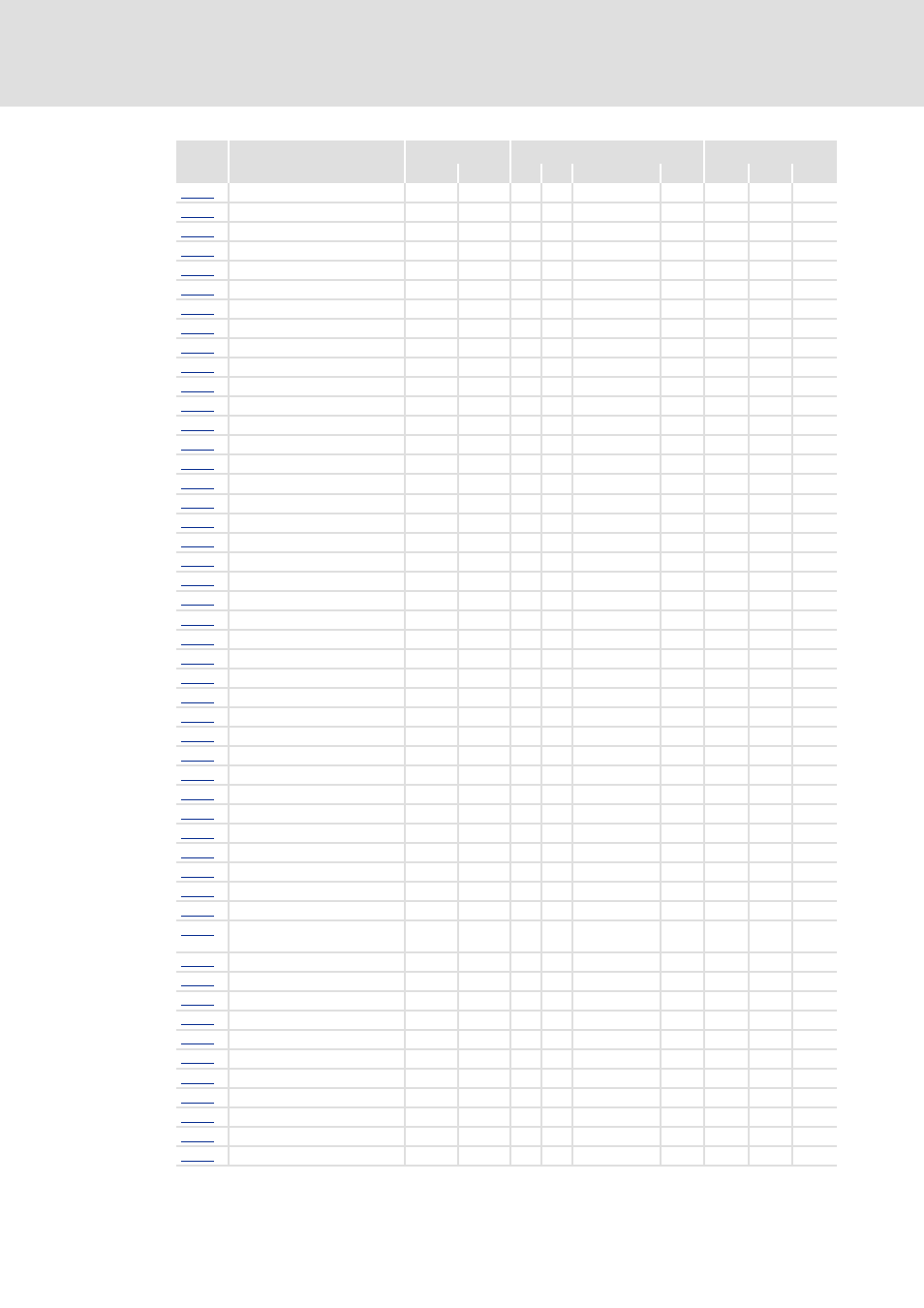
Code
Name
Index
Data
Access
dec
hex
DS
DA
DT
Factor
R
W
CINH