9400 highline | parameter setting & configuration, Outputs – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 181
L
Firmware 1.37 - 09/2006
181
9400 HighLine | Parameter setting & configuration
Basic drive functions
Positioning | System block "LS_Positioner"
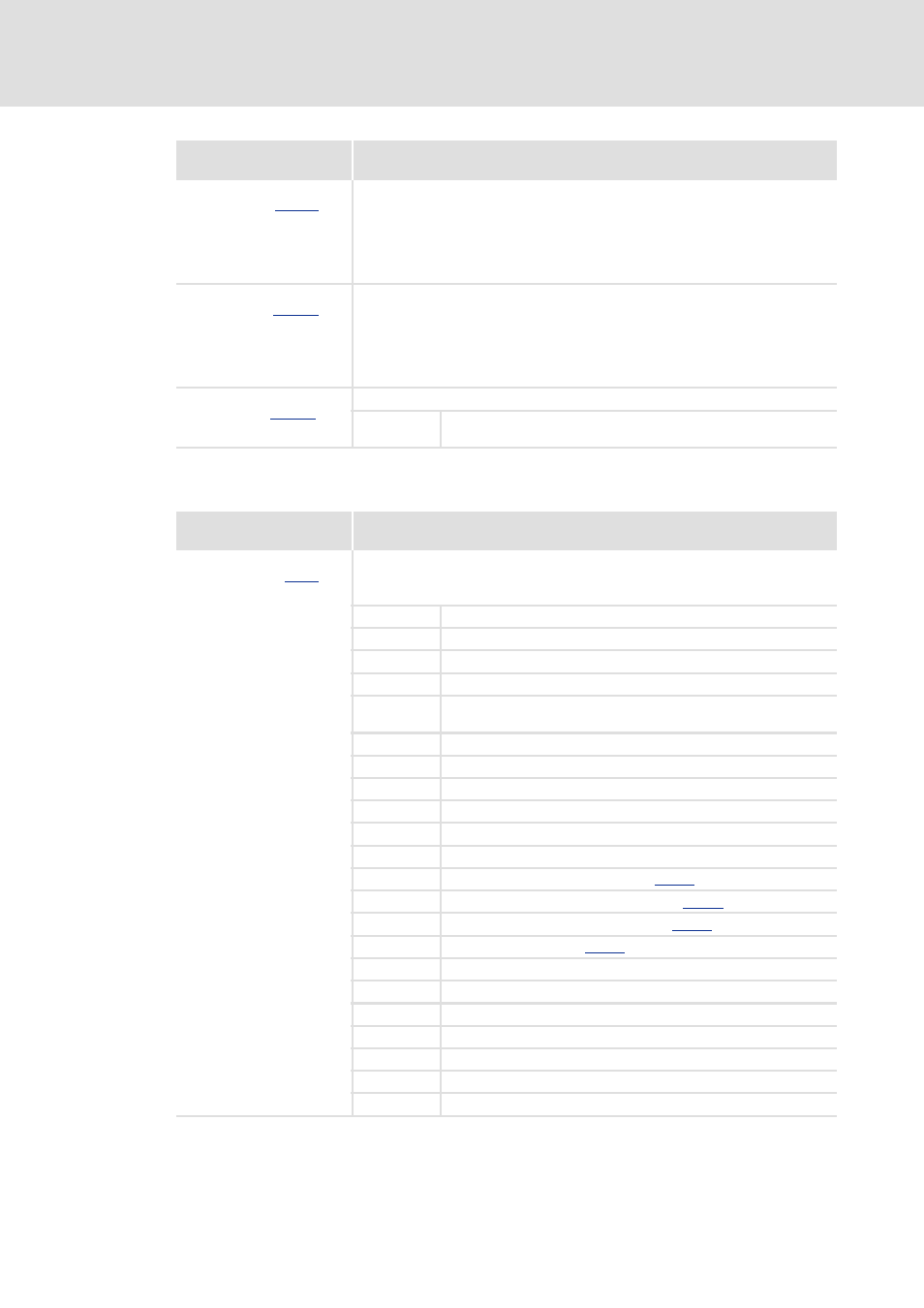
Outputs
POS_dnSpeedOverride_n
| DINT
Value of speed override
• Percentage multiplier for the current profile parameter "Speed".
• Changes are accepted in each cycle.
• 2
30
≡ 100 % of the speed defined in the profile.
• In case of values ≤ 1 % the status bit 18 is set.
• Values ≤ 0 % are set internally to 0 % and let the drive be braked to standstill.
POS_dnAccOverride_n
| DINT
Value for acceleration override
• Percentage multiplier for the current profile parameter "Acceleration".
• Changes are accepted in each cycle.
• 2
30
≡ 100 % of the acceleration defined in the profile.
• In case of values ≤ 1 % the status bit 19 is set.
• Values ≤ 0 % are set internally to 0 % ("no acceleration").
POS_bDisableTP
| BOOL
Deactivating touch probe positioning
TRUE Identified touch probes are ignored. It is not automatically changed
to the TP sequence profile defined in the profile data.
Identifier
DIS code | data type
Value/meaning
POS_dnState
| DINT
Status (bit-coded)
• When the basic function is not enabled, all bits are set to "0".
• Bits which are not listed are not assigned with a status (always "0").
Bit 1 Positioning is active.
Bit 2 Positioning is completed (all profiles are executed).
Bit 3 Acceleration/deceleration phase is active.
Bit 5 CCW rotation is active.
Bit 6 Set position reached (in case of sequence profiles the drive continues
to travel).
Bit 10 Zero crossing in the positioning mode "modulo".
Bit 15 Error in basic function active (group signal).
Bit 16 Positioning is aborted.
Bit 17 Reversing phase is active.
Bit 18 Speed override ≤1 %
Bit 19 Acceleration override ≤1 %
Bit 20 Position is limited by basic function "
".
Bit 21 Profile data are limited by basic function "
".
Bit 22 Direction is inhibited by basic function "
".
Bit 23 Abort by basic function "
".
Bit 24 Home position is not known.
Bit 25 Stopping is active.
Bit 26 Cycle is not known.
Bit 27 Invalid positioning mode.
Bit 28 Invalid change of the positioning mode.
Bit 29 Profile data is not plausible or faulty.
Bit 30 Profile generation error.
Identifier
DIS code | data type
Information/possible settings